
鸿蒙车机多模态交互开发全攻略:从基础到实战的核心指南
随着 5G 通信、人工智能与自动驾驶技术的深度融合,智能网联汽车已成为全球汽车产业转型升级的核心方向。车机系统作为人机交互的核心载体,正从传统的影音娱乐终端加速向 "车辆控制 - 环境感知 - 智能决策" 一体化平台演进。
当前主流车机系统多基于 Linux 或 Android 架构构建,虽具备成熟的应用生态,但在分布式设备协同、实时响应及数据安全方面存在明显短板,甚至存在隐私泄露风险。近年来,国产鸿蒙操作系统崛起,其微内核架构带来的低时延特性、端到端安全机制及跨设备协同能力,为突破传统车机系统瓶颈提供了全新技术路径。本文基于Harmony OS设计实现了一款支持多模态交互、分布式协同与高安全性的车机智能系统,为车载智能系统的国产化研发提供可复用的技术方案。
一、系统总体设计
1.1 设计目标
本系统旨在构建基于 Harmony OS的智能车机平台,核心目标如下:
- 实现车窗、灯光、雨刮等车辆硬件的实时控制及状态监控;
- 支持语音、触控等多模态交互方式,提升驾驶场景操作便捷性;
- 基于分布式架构实现车机与手机、云端等设备的无缝协同;
- 保障系统在复杂车载环境中的通信稳定性与数据安全性;
- 适配国产 Hi3861 开发板,实现核心技术自主控制。
1.2 总体架构
系统基于鸿蒙生态构建 "端 - 云 - 端" 三层架构,通过南向设备端采集数据、云端消息交互、北向车机智能应用端全链路协同,实现车辆状态监测与多场景交互功能:
| 架构层级 | 核心功能 | 关键组件 / 技术 |
|---|---|---|
| 南向设备层 | 数据采集与控制 | 普中 Hi3861 开发板、8 类外设(温湿度传感器、舵机等)、GPIO 接口 |
| 云端服务层 | 数据枢纽 | 华为云 IoT 平台、MQTT 协议、数据持久化存储、规则引擎 |
| 北向应用层 | 智能交互 | DevEco Studio、ArkTS 语言、5 大功能页面、DeepSeek AI 助手 |
1.3 技术特点及对比分析
与传统车机系统的核心差异
| 对比维度 | 传统车机系统(Linux/Android) | 本系统(Harmony OS) |
|---|---|---|
| 架构基础 | 宏内核 / 移动终端移植架构 | 微内核 + 分布式软总线 |
| 资源占用 | 较高 | 降低 40% 以上 |
| 交互体验 | 以触控为主,语音识别准确率 < 90% | 多模态交互,语音识别准确率≥95% |
| 协同能力 | 需额外中间件 | 原生跨设备协同 |
| 智能化水平 | 基础设备控制 | 环境自适应调节 + 复杂指令解析 |
核心技术亮点
- 融合物联网感知技术,实现多源数据采集;
- 引入 AI 大模型优化语音交互的上下文理解能力;
- 采用 MQTT 协议保障南北向数据低时延传输(≤50ms);
- 支持语音式娱乐交互,提升系统附加值。
二、系统南向设计
2.1 南向技术方案
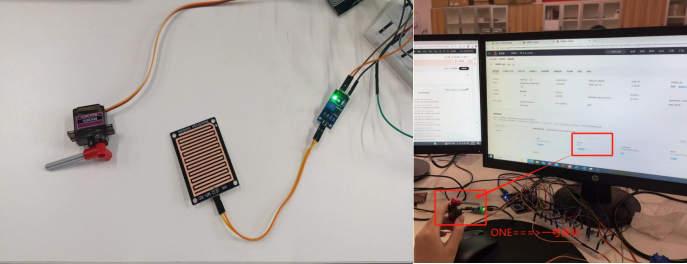
南向硬件以普中 Hi3861 开发板为核心,硬件配置及技术实现如下:
- 核心硬件:MG90S 舵机(控制车窗)、SG90 舵机(控制后备箱)、雨滴传感器、光线传感器、LED 灯组;
- 接口技术:GPIO 接口实现标准化连接,舵机通过 PWM 信号控制,雨滴传感器通过 ADC 通道转换信号;
- 供电保障:稳压电路供电,电压稳定在 3.3V-5V 范围;
- 驱动开发:基于 Harmony OS 驱动框架,采用多线程设计,通过消息队列实现任务间通信。
2.2 南向技术实现
设备控制模块
- 舵机驱动:通过定时器生成精确 PWM 信号,支持 0-180 度角度连续调节;
- 传感器驱动:集成滑动平均滤波算法,采样频率 10Hz,分辨率 12 位;
- 灯光驱动:支持 PWM 调光与冷暖色调节,状态切换响应延迟≤100ms。
MQTT 客户端实现
基于 TCP/IP 协议栈构建通信链路,支持断线自动重连机制,核心代码片段:
typescript
运行
// 初始化TCP Socket实例
let tcpSocket = constructTCPSocketInstance()
// 配置本地IP和端口
let localIp = "0.0.0.0" // 绑定到所有网络接口
let localPort = 9990 // 本地端口
// 服务端配置(南向设备)
let serverIp = "172.17.27.83" // 南向设备IP
let serverPort = 9999 // 南向设备端口
三、系统北向设计
3.1 北向技术开发
北向技术架构分为两大模块:
- 通信服务层:基于 MQTT 协议,支持设备注册与发现、消息路由、QoS=1 可靠传输、自动重连;
- 终端应用层:基于 ArkTS 与 ArkUI 框架,采用 "一页一功能" 模块化设计,适配 12.3 英寸车载大屏(1920×720 分辨率)。
3.2 北向技术实现
五大核心功能页面
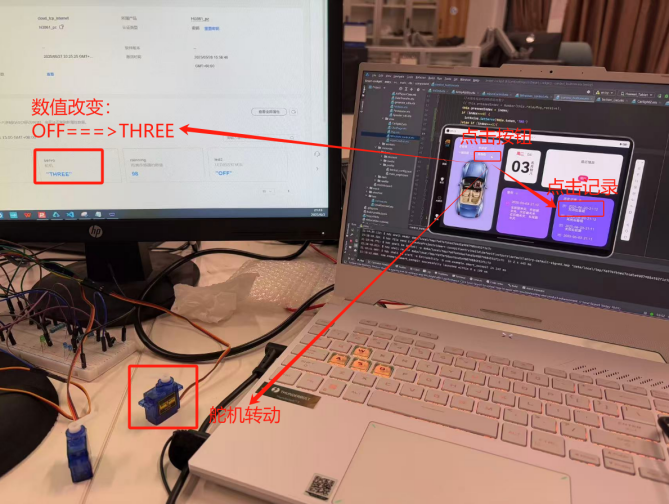
- 车窗控制页:通过按钮索引区分操作对象,支持左窗、右窗、后备箱独立控制,历史记录实时更新;
- 雨刮控制页:5 个速度档位,支持手动调节与雨量自动触发,每 2 秒同步一次雨量数据;
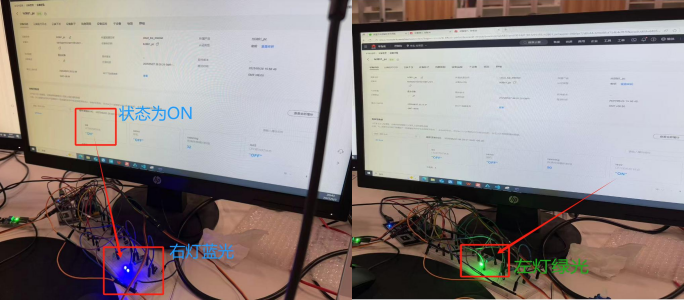
- 灯光控制页:支持车内灯光亮度(1-100%)与冷暖色调(3000K-6500K)调节,车外灯光独立控制;
- 音乐播放页:集成网络音乐接口,支持播放列表管理、歌词同步及音质调节;
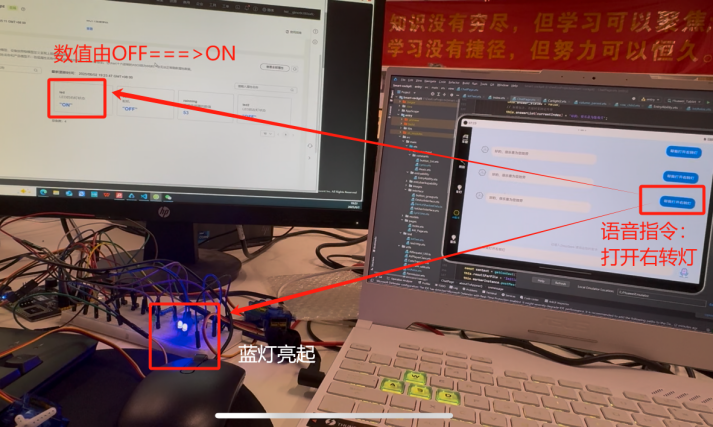
- AI 交互页:集成 DeepSeek-chat 大模型与 sherpa_onnx 语音识别引擎,端云协同部署,响应时延≤300ms。
灯光控制核心代码片段:
typescript
运行
// 灯光控制核心状态定义
controller: SearchController = new SearchController()
@State outSetValue: number = 40 // 亮度初始值
@State outSetValuetwo: number = 40 // 冷暖初始值
@State BOnSt:promptAction.ShowToastOptions = {'message': '已打开照明灯'}
@State BOffSt:promptAction.ShowToastOptions = {'message': '已关闭照明灯'}
@State light_state:boolean=false // 灯光开关状态
AI 交互核心代码片段:
typescript
运行
// 处理接收到的消息
function handleReceivedMessage():
if receiveMsg changed:
updateMessageHistory(receiveMsg)
processControlCommand(receiveMsg)
// 发送消息处理
function handleSendMessage():
if sendMsg not empty:
sendMessageToServer(sendMsg)
updateMessageHistory(sendMsg)
clearSendMsg()
3.3 分布式通信
- 指令传输流程:北向指令→JSON 格式封装→MQTT 协议发布→华为云 IoT 平台转发→南向设备执行→状态回传;
- 典型指令格式:
json
{
"deviceType": "window",
"action": "close",
"target": "leftFront"
}
- 传输保障:采用 QoS=1 服务质量等级,确保消息至少送达一次,数据丢包率低至 0.03%。
四、系统测试
4.1 测试环境
- 硬件环境:普中 Hi3861 开发板(ARM Cortex-M4 内核,160MHz 主频)、12.3 英寸大屏模拟器、各类外设;
- 软件环境:DevEco Studio 5.0、Harmony OS5.0 SDK、华为云 IoT 平台、Wireshark、MQTT.fx;
4.2 南向测试结果
| 测试项 | 测试场景 | 测试结果 |
|---|---|---|
| 车窗控制 | 云端远程控制舵机响应 | 执行成功率 100%,状态回传无延迟 |
| 雨刮控制 | 雨滴传感器触发自动控制 | 检测到水分后自动启动,无水分时停止 |
| 灯光控制 | 云端控制车灯开关 | 状态切换无延迟,反馈信息实时更新 |
| 语音交互 | 语音指令控制硬件 | 识别准确率 95%,端到端响应延迟≤50ms |
关键指标:传感器数据采集误差≤5%,MQTT 通信延迟≤50ms,数据丢包率 0.03%。
4.3 北向测试结果
| 测试项 | 核心测试点 | 测试结果 |
|---|---|---|
| 车窗控制页 | 交互逻辑与组件协同 | 功能完整度 100%,舵机精准响应 |
| 雨刮控制页 | 档位调节与自动适配 | PWM 输出精准变化,雨量适配符合预期 |
| 灯光控制页 | 亮度 / 色调调节与状态显示 | 调节平滑,状态显示准确 |
| AI 交互页 | 语音解析与硬件控制 | 指令执行成功率 100%,交互流畅 |
关键指标:各功能页响应延迟≤100ms,多模态交互符合驾驶场景需求。
五、结束语
本研究基于Harmony OS成功设计实现了车机智能系统,通过 "南向硬件层 - 云端服务层 - 北向应用层" 的协同架构,有效解决了传统车机系统在设备协同性、交互响应效率及国产化适配等方面的技术瓶颈。
主要成果包括:分布式通信延迟控制在 50ms 以内,语音指令识别准确率达 95% 以上,核心技术栈实现自主可控,硬件成本大幅降低。后续研究将进一步扩展设备接入规模,优化 AI 模型轻量化部署方案,持续提升系统在复杂车载场景下的适应性与扩展性。
Harmony OS凭借其分布式架构、原生跨设备协同能力及开源生态优势,在车载智能座舱领域展现出显著技术潜力,可为国产车载智能系统发展提供重要参考。

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐
 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)