
轻规划鸿蒙开发实战10:分布式数据同步深度博弈,UserId 隔离与并发数据冲突消解机
轻规划鸿蒙开发实战10:分布式数据同步深度博弈,UserId 隔离与并发数据冲突消解机制
文章目录
背景介绍
在前面的开发实战中,我们向大家展示了如何利用 HarmonyOS 原生的分布式键值数据库(Distributed KVStore)实现手机和平板电脑间的无感数据同步。得益于分布式软总线强大的底层通信能力,系统自动打通了近场/同局域网内的数据通道,省去了开发者自行搭建中转服务器的繁琐过程。
然而,当我们的应用真正切入日常多端协同场景时,一个经典的分布式并发冲突与一致性保障难题便浮出了水面。
典型痛点场景:
用户在乘坐地铁时将手机切至离线模式(如飞行模式或无网络覆盖的区域),并修改了“年度读书习惯”的达标天数为 15 天。几乎在同一时刻,放置于家中的平板电脑同样由于路由器临时断网而处于离线状态,家人在平板上将该读书习惯的达标天数调整为了 20 天。
当两台设备重新建立网络连接并重组多端局域网网卡时,底层分布式数据库(Distributed KVStore)会拉起同步线程,开始合并两端的数据。
如果底层系统仅仅粗暴地通过物理“时间戳(Timestamp)”来决定谁覆盖谁,会因为两台设备的物理硬件时钟不一致(如本地时间漂移、手动调整时间等)产生判断偏差。这可能导致本应保留的最新数据被无情覆盖,甚至引发稳定性风险。因此,“轻规划”(AeroPlan)在设计之初,就采用了在端侧自研的 UserId 物理隔离 与 逻辑时钟(Vector Clock,向量时钟) 并发的分布式数据冲突消解算法。
本文我们将下沉到分布式数据库的底层,深入剖析冲突检测与一致性保证的核心设计与代码实现。
1. 架构纵览:分布式冲突检测与消解管线
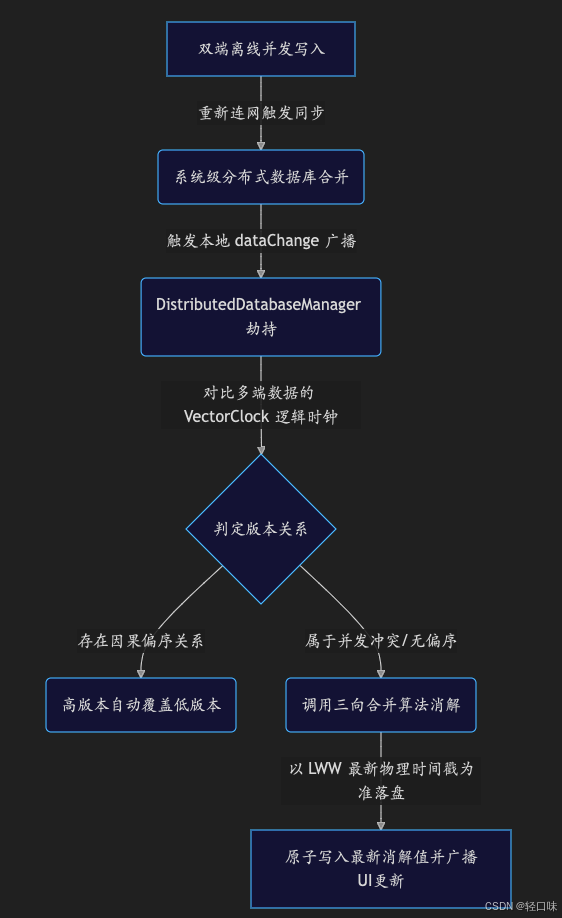
在两端数据合并阶段,我们需要建立起完备的监听、校验与裁决管线。依靠分布式数据库所具备的 dataChange 广播监听机制,我们在端侧接收来自于对端的最新变更数据树。通过获取变更树上的时钟矩阵,我们在端侧沙箱内并行运行消解逻辑,再通过轻规划数据管理中心的原子事务提交写回持久化层。
下图展示了整个同步与冲突检测的动态管线流程:
2. 用户域隔离设计:多账户 UserId 物理隔离与数据库初始化
为了防止多账户共用同一设备或切换账号时发生不合规行为与数据越权覆盖,我们必须在物理层面实现完全的隔离。在 HarmonyOS 中,我们结合 distributedKVStore 初始化时的 Options 配置,通过将账号对应的 UserId 直接动态拼接为 StoreId 的一部分,使不同用户在本地拥有独立的物理数据库路径。
动态隔离初始化代码实现
下面的代码展示了如何安全地在沙箱内完成基于 UserId 物理隔离的单版本分布式数据库配置与初始化:
import { distributedKVStore } from '@kit.ArkData'; // 导入 HarmonyOS 原生的分布式键值数据库模块
import { common } from '@kit.AbilityKit'; // 导入基础能力套件,用于获取当前 Ability 的上下文
export class DistributedDbManager {
// 定义本地 KVManager 实例指针,作为生命周期管理的核心对象
private kvManager: distributedKVStore.KVManager | null = null;
// 定义单版本键值数据库实例指针,承载核心数据的增删改查
private kvStore: distributedKVStore.SingleKVStore | null = null;
/**
* 初始化数据库方法,为当前登录的 UserId 构筑隔离屏障
* @param context UIAbility 级别的上下文,用以访问 Bundle 基础配置和沙箱物理存储权限
* @param userId 当前通过系统账户框架认证获取到的用户唯一标识
*/
public async initStore(context: common.UIAbilityContext, userId: string): Promise<void> {
// 构造 KVManager 配置项,传入当前 Ability 上下文和 BundleName
const kvManagerConfig: distributedKVStore.KVManagerConfig = {
context: context,
bundleName: context.abilityInfo.bundleName
};
try {
// 1. 创建分布式键值管理器实例,注册并接管本应用的分布式数据同步生命周期
this.kvManager = distributedKVStore.createKVManager(kvManagerConfig);
// 2. 为当前 UserId 动态生成隔离的 StoreId,确保不同用户的数据文件在物理层面绝对安全隔离,预防非授权访问
const storeId = `aeroplan_store_${userId}`;
// 3. 配置高阶数据库参数,保证高性能的同时规避稳定性风险
const options: distributedKVStore.Options = {
createIfMissing: true, // 若指定 StoreId 的数据库不存在,则底层自动创建对应的数据库文件
encrypt: true, // 启用硬件安全芯片级的物理文件加密,保障静态数据的机密性,防止物理拷贝或绕过限制提取
backup: true, // 启用持久化备份支持,防范因设备意外断电等原因造成的数据损坏
autoSync: false, // 禁用默认的底层自动同步,避免由于时钟未对齐产生的混乱覆盖,改由应用层策略精确控制
kvStoreType: distributedKVStore.KVStoreType.SINGLE_VERSION, // 选择单版本 KVStore 类型,在基于键值的局部更新中具有极佳的原子写入性能
securityLevel: distributedKVStore.SecurityLevel.S2 // 设定安全等级为 S2,确保存储的数据在跨设备分发时受到系统级密级限制
};
// 4. 从键值管理器中获取或创建具备特定隔离属性的键值数据库实例
this.kvStore = await this.kvManager.getKVStore<distributedKVStore.SingleKVStore>(storeId, options);
console.info('DistributedDbManager', `Successfully initialized isolated KVStore for User: ${userId}`);
} catch (error) {
// 记录详尽的初始化错误日志,防止静默失败导致同步链路异常
console.error('DistributedDbManager', `Failed to initialize isolated KVStore. Detailed error: ${JSON.stringify(error)}`);
throw error;
}
}
/**
* 暴露底层 KVStore 的只读引用,用于后续数据查询与变更注册
*/
public getStore(): distributedKVStore.SingleKVStore | null {
return this.kvStore;
}
}
3. 分布式数据模型设计:引入逻辑版本时钟
在分布式协作架构下,单纯传输业务数据对象(如计划、习惯详情的 JSON)无法完成精准的偏序比对。我们必须引入元数据包装头,为每一个分布式负载设计统一的结构体,包含自定义的向量时钟(Vector Clock)和物理时间戳(Physical Timestamp)。
向量时钟的作用原理
向量时钟是一个大小可变的网络时钟映射表,记录了所有参与修改此数据的节点(设备)各自累积的更新计数。通过解析向量时钟,我们可以无需依赖精准的物理时钟,直接判断出两个数据版本的亲缘偏序关系(是否是后代分支、祖先分支、亦或是发生了平行的分叉冲突)。
分布式同步实体类定义
/**
* 向量时钟接口定义
* 记录多端设备的数据演变版本序列
*/
export interface VectorClock {
// 键(Key)为设备的唯一硬件标识(DeviceID),值(Value)为此设备对该条数据做出的递增修改次数
clocks: Record<string, number>;
}
/**
* 分布式传输统一包装模型
* 所有在分布式单版本 KVStore 中流转的业务数据,必须以此结构打包存储
*/
export interface DistributedPayload {
// 数据项的唯一标识符(如 HabitID)
id: string;
// 核心业务属性的 JSON 序列化字符串,实现元数据与业务逻辑的解耦
dataJson: string;
// 承载此数据版本演化历史的向量时钟对象
vectorClock: VectorClock;
// 设备发起该数据更新时的本地物理时间戳(单位:毫秒),在向量时钟发生冲突时用于 LWW(最后写入者胜出)裁决
lastUpdatedTimestamp: number;
}
4. 核心算法:冲突判定与 LWW 三向合并消解
在端侧多端合并数据时,我们主要处理逻辑偏序判断。为了判断两个版本 A 和 B 是否存在先后偏序:
- 若对于所有设备 ID,时钟
A[DeviceID] >= B[DeviceID],且至少有一个设备 ID 满足A[DeviceID] > B[DeviceID],则我们判定 A 版本比 B 版本新。 - 若部分设备 ID 表现为
A领先,另一部分表现为B领先,则意味着发生了并发冲突(双端在离线状态下各自独立做了不一致的更新)。 - 此时,系统转入
Last-Write-Wins (LWW)物理时间戳兜底合并流程,最终产生唯一的、已调和的版本写回数据库。
版本冲突判定与消解代码
/**
* 分布式数据冲突检测与协调处理器
*/
export class DataConflictResolver {
/**
* 判定两个向量时钟的逻辑先后顺序
* @param clockA 向量时钟 A
* @param clockB 向量时钟 B
* @returns 1 表示 A 领先(A 是 B 的最新演进版);-1 表示 B 领先;0 表示发生了平行的离线并发冲突
*/
public static compareClocks(clockA: VectorClock, clockB: VectorClock): number {
let aHasLarger = false; // 标识 clockA 在某个设备计数上是否严格领先 clockB
let bHasLarger = false; // 标识 clockB 在某个设备计数上是否严格领先 clockA
// 提取两个时钟中出现过的所有设备 ID,合并并去重
const allKeys = new Set([...Object.keys(clockA.clocks), ...Object.keys(clockB.clocks)]);
for (const key of allKeys) {
const valA = clockA.clocks[key] || 0; // 取出 A 在该设备的版本计数,缺失时默认为 0
const valB = clockB.clocks[key] || 0; // 取出 B 在该设备的版本计数,缺失时默认为 0
if (valA > valB) {
aHasLarger = true; // 发现 A 在该设备分支上的版本更新,A 存在领先潜力
} else if (valA < valB) {
bHasLarger = true; // 发现 B 在该设备分支上的版本更新,B 存在领先潜力
}
}
// 逻辑判定:若 A 存在某个字段领先,且没有任何字段落后于 B,则 A 整体领先
if (aHasLarger && !bHasLarger) {
return 1;
}
// 逻辑判定:若 B 存在某个字段领先,且没有任何字段落后于 A,则 B 整体领先
if (!aHasLarger && bHasLarger) {
return -1;
}
// 逻辑判定:若双方均有部分字段领先,说明两端都在离线状态下修改了此数据,产生并发冲突
return 0;
}
/**
* 执行冲突消解,返回最新确认或合并后的数据载荷
* @param local 本地缓存在内存或就近读取的 Payload
* @param remote 远端刚刚拉取到或变更通知同步过来的 Payload
*/
public static resolve(local: DistributedPayload, remote: DistributedPayload): DistributedPayload {
// 首先比较两者的逻辑偏序关系
const clockRelation = this.compareClocks(local.vectorClock, remote.vectorClock);
if (clockRelation === 1) {
// 场景 1:本地时钟严格领先远端,保留本地数据,不做物理写回,忽略本次推送
console.info("DataConflictResolver", `Local version is newer for key: ${local.id}. Keep local.`);
return local;
} else if (clockRelation === -1) {
// 场景 2:远端时钟严格领先本地,表明本地数据已过时,采纳远端数据并准备覆盖更新
console.info("DataConflictResolver", `Remote version is newer for key: ${local.id}. Appling remote.`);
return remote;
} else {
// 场景 3:发生并发分叉冲突(clockRelation === 0)
// 此时启动 LWW 物理时间戳兜底,并融合双方的向量时钟计数最大值,防止合并后的新版本再次被误判为过期
console.warn("DataConflictResolver", `Concurrent conflict occurred on key ${local.id}. Merging vectors and applying LWW.`);
const mergedClock: VectorClock = { clocks: {} };
const allKeys = new Set([...Object.keys(local.vectorClock.clocks), ...Object.keys(remote.vectorClock.clocks)]);
// 合并每一个参与过修改的设备的计数,获取每个轴上的上界
for (const key of allKeys) {
mergedClock.clocks[key] = Math.max(
local.vectorClock.clocks[key] || 0,
remote.vectorClock.clocks[key] || 0
);
}
// 依据设备生成数据更新的本地绝对物理毫秒数,进行 LWW 决策
const winPayload = local.lastUpdatedTimestamp >= remote.lastUpdatedTimestamp ? local : remote;
// 返回融合了统一时钟上限,且使用最新物理时间所对应的值对象的混合 Payload
return {
id: local.id,
dataJson: winPayload.dataJson,
vectorClock: mergedClock,
lastUpdatedTimestamp: Math.max(local.lastUpdatedTimestamp, remote.lastUpdatedTimestamp)
};
}
}
}
冲突消解机制横向对比
| 冲突消解机制 | 核心决策依据 | 存储空间开销 | 典型适用场景 | 局限性 / 稳定性风险 |
|---|---|---|---|---|
| 物理时间戳最后写入者胜出 (LWW) | 物理系统硬件时间(毫秒级比较) | 极小(单条时间戳字段) | 单用户、单设备覆盖式写入 | 极度依赖时钟同步;若硬件时钟存在偏差(物理漂移),会导致最新数据被错误覆盖 |
| 向量时钟 (Vector Clock) | 节点设备的历史版本矩阵 | 中等(随协作设备数线性增长) | 离线离散编辑、多人多端异步协同 | 只能检测冲突并判断偏序,对于真并发(平起平坐)时仍需要兜底规则(如 LWW)进行自动裁决 |
| 无冲突复制数据类型 (CRDT) | 结构化的可交换半群操作集 | 较大(需长期跟踪和合并历史操作记录) | 实时在线协同文档、多端共享白板 | 实现极其复杂,对于结构化且存在依赖关系的复杂业务模型,难以设计完备的无损合并算子 |
5. 极客避坑:自循环数据广播的“死循环”陷阱与静默机制
在 HarmonyOS 中,注册 kvStore.on('dataChange') 会捕获数据库中的内容变化。这就带来了一个极高风险的问题:
当我们在设备 A 收到数据更新广播后,运行了冲突消解算法。在算出了合并后的最新 Payload 之后,我们必然需要将这个调和后的正确数据调用 kvStore.put() 重新写回底层数据库,以维护多端一致性。
然而,这一个写回(put)动作,在本端再次修改了 KV 存储。由于 dataChange 监听器同时捕获了本地写入和对端同步,如果处理不当,设备 A 会再次收到来自本端的 dataChange 广播,误以为又是新数据,进而再度执行判定,向设备 B 发送变更;设备 B 接收后同样重复上述流程,这就触发了分布式信道的“数据广播死循环”(即广播雪崩),导致设备发热、电量耗尽甚至应用由于内存溢出崩溃。
避坑机制:精细化路由机制与静默更新
HarmonyOS 的 dataChange 事件订阅类型分为三种:SUBSCRIBE_TYPE_LOCAL(本地变更)、SUBSCRIBE_TYPE_REMOTE(远端变更)和 SUBSCRIBE_TYPE_ALL(全部变更)。
为了彻底解决广播风暴,我们必须做到以下两点:
- 精准订阅远端变更:只注册
SubscribeType.SUBSCRIBE_TYPE_REMOTE订阅,将本地的单纯业务写操作完全隔离在监听器之外。 - 静默同步写回(Silent-Put):当消解出合并数据写回本地数据库时,如果计算出消解结果与本地现有版本实质一致,则执行内存缓存与 UI 静默刷新,避免重复调用
put向分布式网络信道进行无意义的同版本广播。
数据变更精确处理实现
import { distributedKVStore } from '@kit.ArkData';
export class SyncController {
private kvStore: distributedKVStore.SingleKVStore | null = null;
private localCache: Map<string, DistributedPayload> = new Map();
constructor(store: distributedKVStore.SingleKVStore) {
this.kvStore = store;
}
/**
* 注册网络变更监听器,配置专属静默机制
*/
public registerSyncListener(): void {
if (!this.kvStore) {
return;
}
// 核心安全策略:明确且仅仅订阅来自 REMOTE 类型的远端设备推送,跳过 LOCAL 本地主动写入触发的动作
this.kvStore.on('dataChange', distributedKVStore.SubscribeType.SUBSCRIBE_TYPE_REMOTE, (data) => {
console.info('SyncController', `Received remote dataChange size: ${data.insertEntries.length} inserts`);
// 遍历所有新增和修改的实体记录,执行细颗粒度版本消解
for (const entry of data.insertEntries) {
const key = entry.key;
const value = entry.value.value as string; // 从底层的 Value 中解出字符串载荷
try {
const remotePayload: DistributedPayload = JSON.parse(value);
this.processRemotePayload(key, remotePayload);
} catch (e) {
console.error('SyncController', `Failed to parse payload for key ${key}. Skip.`);
}
}
});
}
/**
* 远端数据载荷的冲突判定与处理
*/
private async processRemotePayload(key: string, remotePayload: DistributedPayload): Promise<void> {
if (!this.kvStore) {
return;
}
// 从本地内存高速缓存中检索本地最新版本,避免频繁读盘造成的性能瓶颈
const localPayload = this.localCache.get(key);
if (!localPayload) {
// 内存中无对应记录,表示此数据是全新接收的,直接刷新内存缓存,并静默持久化至本地
this.localCache.set(key, remotePayload);
await this.kvStore.put(key, JSON.stringify(remotePayload));
console.info('SyncController', `First time sync for key: ${key}. Successfully stored.`);
return;
}
// 运行消解算法得出最终一致性数据
const resolvedPayload = DataConflictResolver.resolve(localPayload, remotePayload);
// 比对最终消解结果是否发生了实质的逻辑变迁(通过向量时钟判断)
const isLocalUpdated = DataConflictResolver.compareClocks(resolvedPayload.vectorClock, localPayload.vectorClock) !== 0;
if (isLocalUpdated) {
// 只有在计算出的最终版本领先于本地版本时,才刷新本地缓存与磁盘,避免由于相同版本再次写入造成二次风暴
this.localCache.set(key, resolvedPayload);
// 执行写入
await this.kvStore.put(key, JSON.stringify(resolvedPayload));
console.info('SyncController', `Conflict solved and updated local database for key: ${key}`);
// 触发 UI 渲染层的发布订阅事件,通知界面重新捞取底层数据进行数据渲染
this.notifyUIUpdate(key, resolvedPayload);
} else {
console.info('SyncController', `Silent mode: Resolved payload matched local cache for key: ${key}. Skip db write.`);
}
}
/**
* 向 UI 模块发布轻量级的通知广播
*/
private notifyUIUpdate(key: string, payload: DistributedPayload): void {
// 实际项目中可在此发出 EventHub 广播或触发 UI State 绑定更新
console.log(`UI notified for updated entry: ${key}`);
}
}
6. 总结与下期预告
通过在 HarmonyOS 原生的单版本分布式数据库 KVStore 之上,构建起基于 UserId 物理隔离的多租户机制,并结合逻辑向量时钟与物理时间戳兜底的三向合并消解算法,我们成功解决了离线并发数据同步冲突这一行业难题。我们为多端无缝无感体验焊上了最后一块坚固的钢板,防范了多端高并发修改场景下潜在的一致性与稳定性风险。
目前,我们已经基本完成了多端 Kit 联调与离线一致性底层架构。接下来,我们将转战 UI 表现层的极客动画开发——把常规的点击打卡动作变成一场漫天的绚丽烟花。
在下一篇文章中,我们将踏入高性能图形绘制的殿堂:自研 Haptic Canvas 粒子物理系统,纯 ArkUI 实现高性能体感打卡烟花特效! 敬请期待。

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐



 0
0 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)