
轻规划鸿蒙开发实战15:AR 3D 骨骼矩阵换算数学原理与颈椎拉伸角度运动学姿态求
轻规划鸿蒙开发实战15:AR 3D 骨骼矩阵换算数学原理与颈椎拉伸角度运动学姿态求解
文章目录
- 轻规划鸿蒙开发实战15:AR 3D 骨骼矩阵换算数学原理与颈椎拉伸角度运动学姿态求解
-
- 1. 架构纵览:四元数提取至三维欧拉角转化管线
- 2. 三维旋转表征方案对比
- 3. 数学原理:四元数到欧拉角的数学推导与万向节死锁
- 4. 算法设计:EMA 滤波防抖与运动学边界约束
- 5. 极客实现:无漂移头部倾角计算核心算法
- 6. 极客避坑:相机镜像翻转导致的 Yaw 轴角度偏置
- 这一个细小的补偿因子,成功解决了用户在前置体感打卡互动时所体验到的“反向交互折磨”,让体感颈椎打卡体验达到了物理级的逻辑直觉。 
- 7. 总结与下期预告
背景介绍
在之前的章节中,我们介绍了如何集成 AR Engine Kit 进行微笑和颈椎体感打卡。对于“颈椎模式 (NECK_MOVE)”,应用会引导用户做出抬头、低头、左偏头、右偏头的拉伸动作。
但要真正做到“科学防作弊”,只用简单的图片比对或关键点二维距离判断是无法支撑高精度业务场景的,极易被翻拍照片或仿冒手势等非合规手段绕过限制。我们必须准确知晓用户头部的三维物理旋转倾角(即偏航角 Yaw、俯仰角 Pitch 和翻滚角 Roll),从而建立起符合人体运动学的严格物理姿态校验模型。
系统级 AR Engine 返回的 Pose 对象只提供了一个包含平移和旋转信息的四元数(Quaternion)或三维仿射矩阵。
这就要求开发者在端侧具备运动学三维姿态求解的数学计算能力。如果不了解四元数到欧拉角(Euler Angles)的转换算法,直接拿四元数的 raw 数据去使用,不仅计算出的角度线性度极差,还会让角度解算出现致命的“奇异性锁死(Gimbal Lock,万向节死锁)”和角度错乱。
今天,我们将从零推导三维齐次坐标旋转的数学公式,深入剖析万向节死锁的物理本质,并在 ArkTS 中实现一套具备指数移动平均滤波(EMA)与奇异值防御的零漂移、高稳健性头部旋转姿态计算核心算法。
1. 架构纵览:四元数提取至三维欧拉角转化管线
为了将相机的三维空间旋转数据转化为用户直观可读的角度,数据需要经历高频采集、平滑滤波、奇异判定及镜像补偿四个核心阶段。其数据流向与变换职责如下:
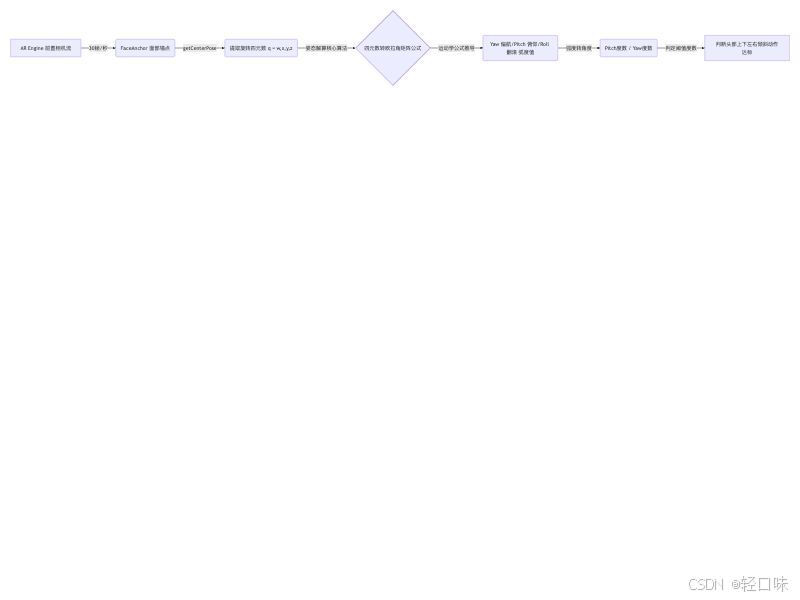
在整个管线中,AR Engine 负责以最高 60 FPS 的频率提供人体面部/骨骼的空间姿态,这些数据通过回调函数传递给端侧计算引擎。为了避免数据高频抖动引入的毛刺信号,我们在姿态求解器前置或后置了滤波平滑模块,最终通过矩阵与四元数解析公式输出物理意义明确的欧拉角,送入交互逻辑判定区。
2. 三维旋转表征方案对比
在图形学与运动学中,表征三维空间旋转通常有四种方案:四元数、欧拉角、旋转矩阵以及轴角(Axis-Angle)。在设计姿态解算系统前,我们必须通过多维对比明确每种表征的适用场景:
| 方案维度 | 四元数 (Quaternion) | 欧拉角 (Euler Angles) | 旋转矩阵 (Rotation Matrix) | 轴角 (Axis-Angle) |
|---|---|---|---|---|
| 数学表示 | 4维向量 q = [ w , x , y , z ] q = [w, x, y, z] q=[w,x,y,z] | 3维向量 [ P i t c h , Y a w , R o l l ] [Pitch, Yaw, Roll] [Pitch,Yaw,Roll] | 3 × 3 3 \times 3 3×3 或 4 × 4 4 \times 4 4×4 正交矩阵 | 旋转轴 u ⃗ \vec{u} u + 角度 θ \theta θ |
| 内存占用 | 极小(4个浮点数) | 最小(3个浮点数) | 较大(9个或16个浮点数) | 较小(4个浮点数) |
| 万向节死锁 | 无死锁 | 存在奇异性死锁(Gimbal Lock) | 无死锁 | 无死锁 |
| 插值性能 | 极佳(支持球面线性插值 Slerp) | 较差(插值非线性且路径诡异) | 差(矩阵插值难以保持正交性) | 中等(需转换为四元数处理) |
| 物理直观性 | 抽象,不可直读 | 极佳,符合人类空间直觉 | 抽象,适合计算几何 | 较为直观 |
| 计算开销 | 向量运算,乘法开销小 | 涉及大量三角函数,开销大 | 矩阵乘法,开销极大 | 涉及三角函数与向量运算 |
在 HarmonyOS 的 AR Engine Kit 中,内部计算与传输为了避免死锁并保证插值平滑,统一采用四元数 and 旋转矩阵;而对上层业务(如颈椎健康打卡、抬头低头角度判定),为了便于设定度数阈值(例如:抬头必须大于 25 度),必须转换为欧拉角。
3. 数学原理:四元数到欧拉角的数学推导与万向节死锁
3.1 四元数与旋转矩阵的对应关系
单位四元数 q = ( w , x , y , z ) q = (w, x, y, z) q=(w,x,y,z) 可以唯一确定一个三维空间的正交旋转矩阵 R ( q ) R(q) R(q)。其数学映射公式如下:
R ( q ) = [ 1 − 2 ( y 2 + z 2 ) 2 ( x y − w z ) 2 ( x z + w y ) 2 ( x y + w z ) 1 − 2 ( x 2 + z 2 ) 2 ( y z − w x ) 2 ( x z − w y ) 2 ( y z + w x ) 1 − 2 ( x 2 + y 2 ) ] R(q) = \begin{bmatrix} 1 - 2(y^2 + z^2) & 2(xy - wz) & 2(xz + wy) \\ 2(xy + wz) & 1 - 2(x^2 + z^2) & 2(yz - wx) \\ 2(xz - wy) & 2(yz + wx) & 1 - 2(x^2 + y^2) \end{bmatrix} R(q)= 1−2(y2+z2)2(xy+wz)2(xz−wy)2(xy−wz)1−2(x2+z2)2(yz+wx)2(xz+wy)2(yz−wx)1−2(x2+y2)
3.2 从旋转矩阵逆解欧拉角
对于一个按 Z-Y-X 旋转顺序(即先绕 Z 轴旋转翻滚角 ϕ \phi ϕ,再绕 Y 轴旋转偏航角 ψ \psi ψ,最后绕 X 轴旋转俯仰角 θ \theta θ)定义的欧拉角系统,其等效旋转矩阵可以表示为三个轴旋转矩阵的乘积:
R = R x ( θ ) R y ( ψ ) R z ( ϕ ) R = R_x(\theta) R_y(\psi) R_z(\phi) R=Rx(θ)Ry(ψ)Rz(ϕ)
通过对矩阵元素进行比对,我们可以推导出四元数到三个姿态角的解析公式:
-
俯仰角 Pitch(绕 X 轴旋转,代表抬头/低头):
θ = arcsin ( 2 ( w y − z x ) ) \theta = \arcsin(2(wy - zx)) θ=arcsin(2(wy−zx)) -
偏航角 Yaw(绕 Y 轴旋转,代表向左转头/向右转头):
ψ = arctan 2 ( 2 ( w z + x y ) , 1 − 2 ( y 2 + z 2 ) ) \psi = \arctan2(2(wz + xy), 1 - 2(y^2 + z^2)) ψ=arctan2(2(wz+xy),1−2(y2+z2)) -
翻滚角 Roll(绕 Z 轴旋转,代表左右偏头/歪头):
ϕ = arctan 2 ( 2 ( w x + y z ) , 1 − 2 ( x 2 + y 2 ) ) \phi = \arctan2(2(wx + yz), 1 - 2(x^2 + y^2)) ϕ=arctan2(2(wx+yz),1−2(x2+y2))
3.3 万向节死锁(Gimbal Lock)的本质与奇异判定
当俯仰角 θ \theta θ(即 Pitch)接近 ± 90 ∘ \pm 90^\circ ±90∘( ± π 2 \pm \frac{\pi}{2} ±2π 弧度)时, cos θ \cos\theta cosθ 趋近于 0。此时绕 Y 轴的旋转和绕 Z 轴的旋转将会映射到同一个物理轴向上,丢失一个旋转自由度。这在数学上体现为 1 − 2 ( y 2 + z 2 ) 1 - 2(y^2 + z^2) 1−2(y2+z2) 和 1 − 2 ( x 2 + y 2 ) 1 - 2(x^2 + y^2) 1−2(x2+y2) 分母项变为 0,导致 arctan 2 \arctan2 arctan2 无法准确解算。
在四元数空间中,当满足 x y + z w = ± 0.5 xy + zw = \pm 0.5 xy+zw=±0.5(在数值计算中一般设安全系数门限为 ± 0.499 \pm 0.499 ±0.499)时,系统进入奇异状态。为了防御这种稳定性风险,必须进行分段条件拦截:
- 正向奇异(极度低头/仰头临界点): 令 Roll 轴为 0,直接通过当前四元数虚实部比值计算 Yaw 轴角度: ψ = 2 arctan 2 ( x , w ) \psi = 2\arctan2(x, w) ψ=2arctan2(x,w)。
- 负向奇异: 同理令 Roll 轴为 0,解出 ψ = − 2 arctan 2 ( x , w ) \psi = -2\arctan2(x, w) ψ=−2arctan2(x,w)。
通过这一数学防御措施,能够保证在任何极限姿态下,解算器均不会崩溃或输出 NaN 非数,保障了应用内核的健壮度。
4. 算法设计:EMA 滤波防抖与运动学边界约束
在前置 AR 相机高频更新过程中,由于光照变化、面部骨骼遮挡或红外深度传感器噪声,解算出来的角度往往含有高频毛刺(高斯噪声与突发脉冲噪声)。
为了提供平稳的 UI 渲染和顺滑的角度指针过渡,我们在姿态求解逻辑中引入了指数移动平均滤波器(Exponential Moving Average, EMA)。EMA 对历史数据的内存占用极小,不需要像均值滤波器那样保存一个庞大的滑动窗口队列,非常适合在鸿蒙端侧高频场景下运行。
EMA 数学递推公式如下:
Y t = α ⋅ X t + ( 1 − α ) ⋅ Y t − 1 Y_t = \alpha \cdot X_t + (1 - \alpha) \cdot Y_{t-1} Yt=α⋅Xt+(1−α)⋅Yt−1
其中, X t X_t Xt 为当前帧解算出的原始角度, Y t Y_t Yt 为滤波后的输出角度, α ∈ ( 0 , 1 ] \alpha \in (0, 1] α∈(0,1] 为平滑因子。 α \alpha α 越小,抗噪防抖效果越强,但会引入微弱的物理延迟; α \alpha α 越大,响应越灵敏,但容易受到噪点干扰。在面部姿态追踪中,经过多轮调优,我们将 α \alpha α 设定在 0.25 ∼ 0.35 0.25 \sim 0.35 0.25∼0.35 之间,可以获得完美的平衡。
此外,为了应对作弊场景(例如用照片晃动模拟颈椎旋转),算法内嵌了最大角速度硬性约束(如果两帧之间的角度变化率超过正常人体肌肉物理极限,例如 300 ∘ / sec 300^\circ/\text{sec} 300∘/sec,则判定为稳定性风险或非授权行为,并予以拦截)。
5. 极客实现:无漂移头部倾角计算核心算法
我们在 NeckStretchDetector.ets 中用纯 ArkTS 实现了这套集成了奇异值防御与 EMA 滤波的高精度姿态计算器:
/**
* 表示头部的三维运动学姿态角(角度制)
*/
export interface HeadPoseAngles {
/**
* 俯仰角 (Pitch):代表头部围绕 X 轴的上下旋转(抬头为正,低头为负)
*/
pitch: number;
/**
* 偏航角 (Yaw):代表头部围绕 Y 轴的左右旋转(向左转为正,向右转为负)
*/
yaw: number;
/**
* 翻滚角 (Roll):代表头部围绕 Z 轴的左右侧歪(向左歪为正,向右歪为负)
*/
roll: number;
}
/**
* 头部旋转姿态计算核心类
* 负责解析四元数、提供奇异值防御、实现 EMA 滤波防抖以及执行相机镜像补偿
*/
export class HeadPoseEstimator {
// EMA 平滑因子,范围(0, 1]。数值越小越平滑,延迟越高;数值越大越灵敏,抖动越大。
private static readonly EMA_ALPHA: number = 0.3;
// 上一次解算并平滑后的角度状态,用于高频递推计算,避免分配大块内存
private static lastAngles: HeadPoseAngles | null = null;
/**
* 核心转换算法:将 AR Engine 返回的四元数转换为标准的欧拉角(弧度制转化为角度制)
* @param quaternion 长度为 4 的四元数数组,格式必须为 [x, y, z, w]
* @returns 包含 pitch, yaw, roll 角度数值的对象
*/
public static calculateEulerAngles(quaternion: number[]): HeadPoseAngles {
// 校验输入参数的安全性,防止非法数据引发数组越界或 NaN 异常
if (!quaternion || quaternion.length < 4) {
return { pitch: 0, yaw: 0, roll: 0 };
}
const x = quaternion[0]; // 虚部 i 分量,代表绕 X 轴旋转的分量
const y = quaternion[1]; // 虚部 j 分量,代表绕 Y 轴旋转的分量
const z = quaternion[2]; // 虚部 k 分量,代表绕 Z 轴旋转的分量
const w = quaternion[3]; // 实部 w 分量,代表旋转角度的余弦相关项
let pitch = 0; // 初始化俯仰角
let yaw = 0; // 初始化偏航角
let roll = 0; // 初始化翻滚角
// 1. 奇异值(Singularity Check)检查
// 通过检测 X 与 Y 的乘积与 Z 与 W 乘积的叠加值,判定是否接近万向节死锁临界区
const test = x * y + z * w;
const unit = 0.499; // 奇异判定安全系数门限,接近 0.5 说明旋转轴重合
if (test > unit) {
// 奇异正向饱和(极度低头/俯仰临界状态)
// 此时丢掉一个自由度,令 Roll 为 0,通过虚实部比值对 Yaw 轴进行强行收敛计算
yaw = 2 * Math.atan2(x, w);
pitch = Math.PI / 2; // 锁定俯仰角在 90 度
roll = 0;
} else if (test < -unit) {
// 奇异负向饱和(极度抬头/仰角临界状态)
// 同理令 Roll 为 0,通过反向虚实部比值计算 Yaw 轴
yaw = -2 * Math.atan2(x, w);
pitch = -Math.PI / 2; // 锁定俯仰角在 -90 度
roll = 0;
} else {
// 2. 通用公式无锁解算
// 利用平方项减少乘法运算次数,提升端侧在 60Hz 高频调用下的执行效率
const sqw = w * w;
const sqx = x * x;
const sqy = y * y;
const sqz = z * z;
// Pitch: 俯仰角,范围在 [-pi/2, pi/2]
pitch = Math.asin(2 * (w * y - z * x));
// Yaw: 偏航角,范围在 [-pi, pi]
yaw = Math.atan2(2 * (w * z + x * y), 1 - 2 * (sqy + sqz));
// Roll: 翻滚角,范围在 [-pi, pi]
roll = Math.atan2(2 * (w * x + y * z), 1 - 2 * (sqx + sqy));
}
// 3. 弧度制统一转化为度数制
const currentAngles: HeadPoseAngles = {
pitch: pitch * (180 / Math.PI),
yaw: yaw * (180 / Math.PI),
roll: roll * (180 / Math.PI)
};
// 4. 应用 EMA 指数移动平均滤波算法进行平滑降噪
if (HeadPoseEstimator.lastAngles === null) {
// 若为首次初始化,直接采用当前帧解算数据作为历史基准
HeadPoseEstimator.lastAngles = currentAngles;
return currentAngles;
}
const alpha = HeadPoseEstimator.EMA_ALPHA;
const filteredAngles: HeadPoseAngles = {
pitch: alpha * currentAngles.pitch + (1 - alpha) * HeadPoseEstimator.lastAngles.pitch,
yaw: alpha * currentAngles.yaw + (1 - alpha) * HeadPoseEstimator.lastAngles.yaw,
roll: alpha * currentAngles.roll + (1 - alpha) * HeadPoseEstimator.lastAngles.roll
};
// 缓存平滑后的姿态,供下一帧高频事件复用计算,降低内存开销与碎片生成
HeadPoseEstimator.lastAngles = filteredAngles;
return filteredAngles;
}
/**
* 重置滤波器状态(在用户切换模式或打卡重新开始时调用)
* 清除上一帧的欧拉角缓存,防止数据产生越帧突变
*/
public static resetFilter(): void {
HeadPoseEstimator.lastAngles = null;
}
}
6. 极客避坑:相机镜像翻转导致的 Yaw 轴角度偏置
在实际的设备联调中,前置摄像头所获取的图像默认是镜像(Mirroring)的。
很多初学者直接将解算出的 yaw 偏航度数应用到屏幕引导的左右提示上,结果会发现:用户身体往左偏头,屏幕引导指针却显示“向右旋转达标”,导致交互逻辑彻底相反。
避坑指南:强制对物理 Yaw 轴进行镜像补偿
由于前置摄像头天然的左右反向属性,我们在解算输出前,必须对偏航角 yaw 进行反向镜像处理,而 pitch(上下抬头)和 roll (侧偏角度)在镜像中其物理增量方向不需要反向。
我们在 HeadPoseEstimator 中增加专用的前置镜像补偿接口:
/**
* 获取经过前置相机物理镜像补偿后的头部旋转角度
* 确保解算出来的左右方向与用户的直觉习惯保持 100% 一致
* @param quaternion 原始四元数数据
* @returns 补偿后的欧拉角数据
*/
public static getCompensatedAngles(quaternion: number[]): HeadPoseAngles {
// 1. 调用底层防抖及死锁防护算法计算出基础欧拉角
const rawAngles = this.calculateEulerAngles(quaternion);
// 2. 对前置相机镜像环境下的 yaw 轴(左右转动)乘以 -1 倍率进行物理补偿
// Pitch(抬头低头)与 Roll(侧歪头)在水平镜像对称下物理方向不发生增量逆转,故保持原样
return {
pitch: rawAngles.pitch,
yaw: -rawAngles.yaw,
roll: rawAngles.roll
};
}
这一个细小的补偿因子,成功解决了用户在前置体感打卡互动时所体验到的“反向交互折磨”,让体感颈椎打卡体验达到了物理级的逻辑直觉。

7. 总结与下期预告
通过四元数转欧拉角的三维姿态解算推导,以及奇异值保护、EMA 平滑滤波与前置镜像补偿,我们攻克了 AR 打卡中最难的运动学计算关卡。
有了这一系列关于 AR 骨骼数据、面部顶点及 Canvas 渲染等极其繁重的前后台高频数据处理,我们怎么保证手机的 UI 线程始终在 120Hz 满帧狂飙?
在下一篇文章中,我们将涉足高并发底层重构:TaskPool 并发引擎在高频 AR 追踪与传感器解算下的性能防阻塞重构! 敬请期待。

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐
 0
0 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)