
Codex帮你自动配置WSL版SpireCV-Pro:面向智能无人系统的边缘实时感知平台
SpireCV-Pro 是一个专为智能无人系统、移动机器人和边缘 AI 设备打造的实时感知开发平台。它不是单纯把算法模型封装成 SDK,而是把相机、视频流、激光雷达、目标检测、分割、跟踪、吊舱控制、结果可视化、视频保存、推流、ROS2 转发、评估与数据迭代等能力,拆解成可以多平台(工作站、NX、瑞芯微、昇腾)自由组合的节点,让开发者像搭积木一样构建自己的感知工作流。
一句话概括:SpireCV-Pro 让视觉感知算法从“能跑的 demo”走向“能在真实无人系统里长期运行、跨平台部署、持续迭代的工程系统”。
01 让Codex自动配置SpireCV-Pro
在Windows系统的Codex中输入:
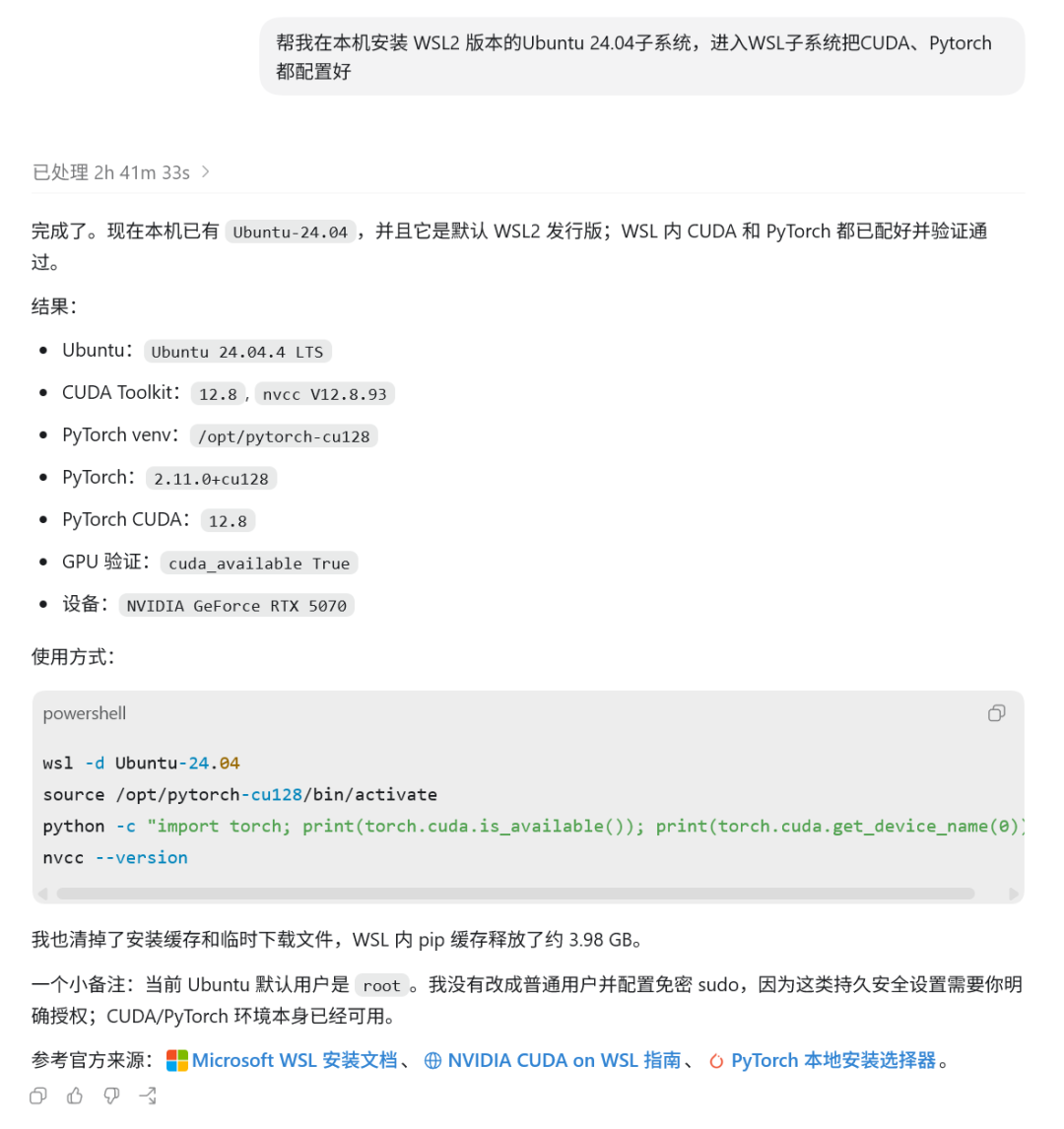
帮我在本机安装 WSL2 版本的Ubuntu 24.04子系统,进入WSL子系统把CUDA、Pytorch都配置好。
接着,对Codex说:
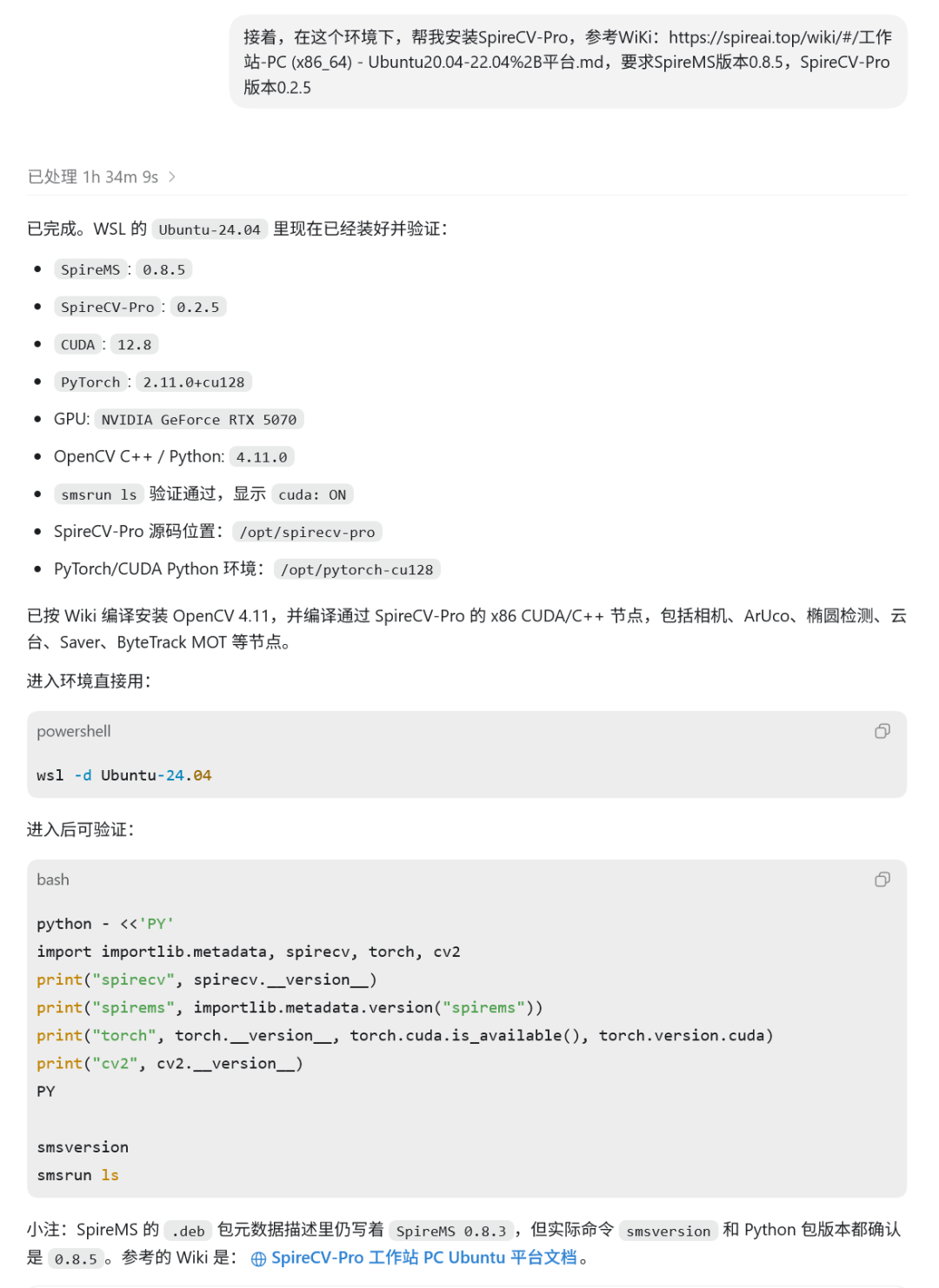
在这个环境下,帮我安装SpireCV-Pro,参考WiKi:https://spireai.top/wiki,要求SpireMS版本0.8.7,SpireCV-Pro版本0.2.5(当前最新版本).
02 效果展示
(1)集成二维码检测
运行命令:
smsrun viddet_landing_pad_fei效果如下:
(2)目标点击跟踪
运行命令:
smsrun vid_object_click_tracking_cuda
# 鼠标左键点击目标开始跟踪,ESC键退回到检测状态效果如下:
(3)水下图像增强
运行命令:
smsrun vid_underwater_enhancement_cuda效果如下:
(4)点云三维目标检测
下载数据集velodyne_0001.zip,解压后运行命令:
# 打开命令行窗口1,输入
# 注意修改/home/amov/Downloads/velodyne_0001为本机的实际路径
# repeated为是否连续播放
smsrun pbinreader bin_dir=/home/amov/Downloads/velodyne_0001 rate=10 auto_next=1 repeated=1
# 打开命令行窗口2,输入
# 启动检测算法
smsrun pptpillarscuda效果如下:
注意:可视化结果需要使用 Foxglove 软件查看,并确认已开启 smsfox。
03 参考资料
-
SpireCV-Pro官方Wiki:https://spireai.top/wiki
-
smsrun管理节点运行:https://spireai.top/wiki#/如何使用smsrun管理节点运行.md
-
SpireCV-Pro源码仓库:https://gitee.com/spirecv/spirecv-pro.git
-
阿木社区SpireCV问答专区:https://bbs.amovlab.com/

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐
 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)