
鸿蒙车规级MCU开发方案
鸿蒙车规级MCU开发技术解析 华为鸿蒙系统在车载领域采用分布式架构与微内核设计,实现跨设备低时延协同(85ms)和高效资源管理(占用减少40%)。系统分为轻量级LiteOS(MCU控制)和标准HarmonyOS(智能座舱)两大分支,其中LiteOS内核可裁剪至10KB,特别适合车身控制等嵌入式场景。开发环境基于DevEco Device Tool工具链,支持Hi3861等MCU开发板快速编译(2分
一、鸿蒙车规级MCU概述
1.1 鸿蒙在车载领域的战略布局
在智能汽车渗透率突破75%的2026年,车载操作系统已从功能载体演变为连接人、车、路的数字中枢。华为鸿蒙系统凭借其分布式架构与微内核设计,在车载领域实现了三大突破:跨设备协同时延降低至85ms、多屏交互帧率稳定60fps、系统资源占用减少40%。
鸿蒙车载系统采用"联邦制"路线,开放HarmonyOS智能座舱给车企定制,在保留品牌自主权的同时共享生态。数据显示,搭载鸿蒙衍生系统的车型第三方应用数量平均达837款,是特斯拉的3.2倍。这种分层开放的模式,使华为既能保持核心技术掌控力,又能让车企保留品牌差异化的空间。
1.2 LiteOS与HarmonyOS在MCU上的适配
鸿蒙车载系统根据硬件能力分为不同的系统类型:
| 系统类型 | 适用硬件 | 内核 | 典型应用 |
|---|---|---|---|
| 轻量系统 | Hi3861等MCU | LiteOS Kernel | 传感器节点、车身控制 |
| 小型系统 | Hi3516DV300 | Linux Kernel | 智能座舱、仪表盘 |
| 标准系统 | 高性能SoC | Linux Kernel | 自动驾驶计算平台 |
LiteOS作为鸿蒙面向物联网和嵌入式场景的轻量级内核,其基础内核体积可裁剪至不到10KB,RAM占用最低仅需2KB。这种极致轻量化使其特别适合车规级MCU场景,如车身控制模块、灯光控制、BMS管理等对资源敏感的应用。
1.3 与Android Automotive的核心差异
| 特性 | HarmonyOS | Android Automotive |
|---|---|---|
| 架构设计 | 微内核+分布式软总线 | Linux宏内核 |
| 设备协同 | 原生分布式,跨设备无缝流转 | 需要额外适配 |
| 安全性 | TEE安全芯片+国密算法 | SELinux强制访问控制 |
| 更新方式 | OTA差分升级,70%体积缩减 | 全量更新为主 |
| 生态开放 | 3000+应用,HUAWEI HiCar | Google Play |
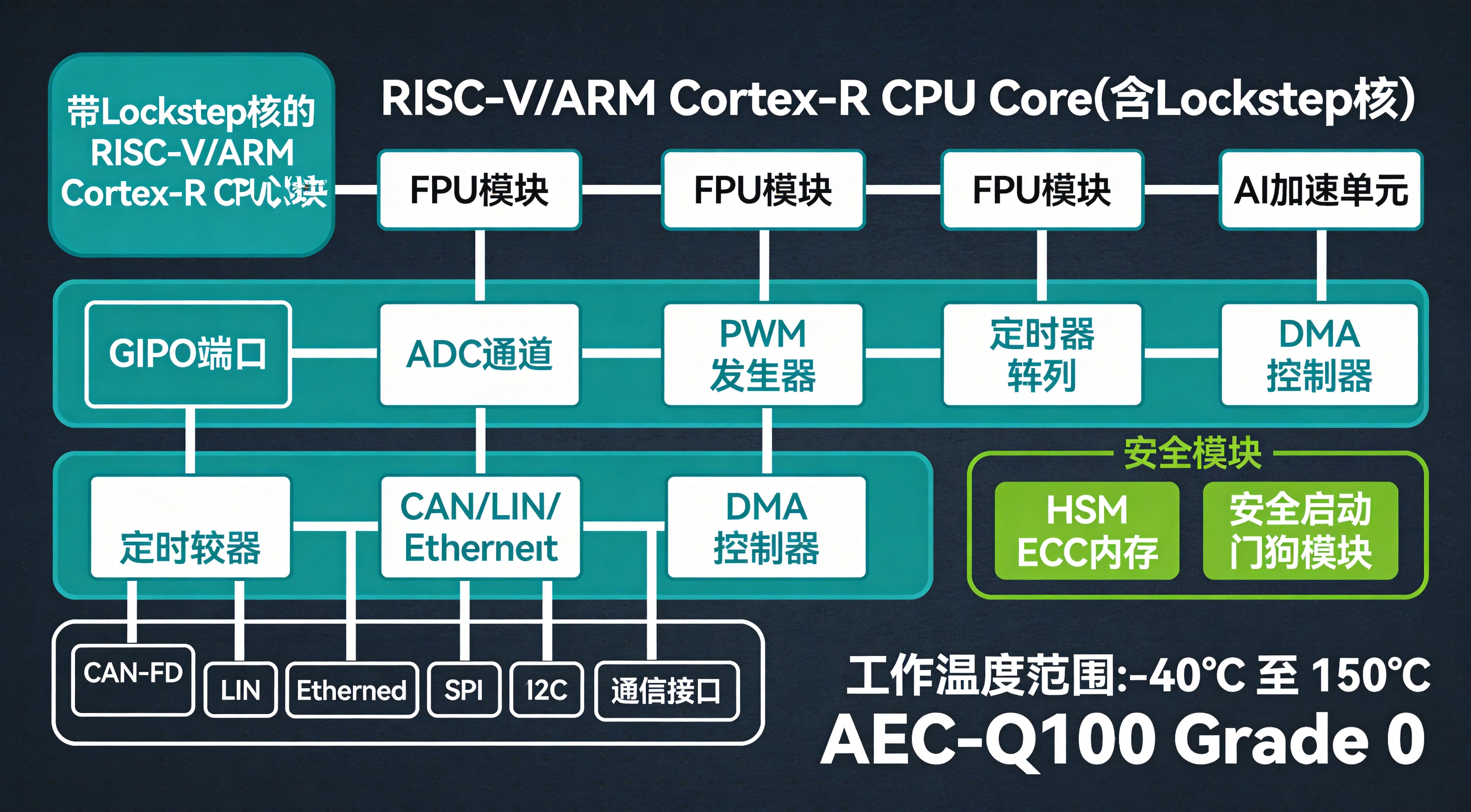
图1:鸿蒙车载系统架构图
如图1所示,鸿蒙车载系统采用分层架构设计。最顶层是应用层,包括导航、语音助手、娱乐、车辆控制等应用;框架层提供ArkUI、Ability Kit、分布式服务等能力;系统服务层包含车身硬件服务(VHS)、媒体服务、BMS服务、OTA服务等核心模块;内核层根据硬件能力选择Linux或LiteOS。值得关注的是,系统在AP(应用处理器)和MCU子系统之间通过分布式软总线实现高效通信,这种架构使得MCU可以专注于实时性要求高的车身控制任务,而复杂的人机交互交给AP处理。
二、开发环境搭建
2.1 工具链概述
鸿蒙MCU开发需要以下核心工具:
- DevEco Device Tool:华为提供的面向IoT设备开发的IDE,基于VSCode扩展
- Hi3861/Hi3516 SDK:芯片级软件开发包
- OpenHarmony源码:可从Gitee获取完整源码
- HiBurn:串口烧录工具
2024年后推出的DevEco Device Tool 3.1+版本已支持纯Windows环境开发Hi3861,相比传统的Linux虚拟机方案,编译速度提升约40%,首次编译仅需2分30秒。
2.2 开发板选型
| 开发板 | 主控芯片 | 主频 | 存储资源 | 适用场景 |
|---|---|---|---|---|
| BearPi-HM Nano | Hi3861RNIV100 | 160MHz | 352KB SRAM | 传感器节点、入门学习 |
| HiSpark AI Camera | Hi3516DV300 | 400MHz | 2GB DDR4 | 智能视觉、行车记录仪 |
| 普中Hi3861 | Hi3861 | 160MHz | 352KB SRAM | 智能家居、车身控制 |
2.3 源码获取与编译
# 安装hb工具(HarmonyOS编译构建系统)
pip install ohos-build
# 下载OpenHarmony源码
git clone https://gitee.com/openharmony/manifest.git
cd manifest
git checkout v4.1-Release
# 初始化编译环境
python build.py sufei
# 编译Hi3861应用
hb set -root .
hb set -product Hi3861
hb build -f
# 烧录固件(使用HiBurn工具通过串口烧录)
三、鸿蒙MCU外设驱动开发
3.1 HDF驱动框架概述
HDF(Hardware Driver Foundation)是OpenHarmony统一的驱动框架,提供了标准化的驱动开发模型。HDF框架采用"配置-驱动-服务"的解耦设计,通过HCS(HDF Configuration Source)文件声明硬件资源,驱动代码与配置分离。
3.2 GPIO驱动开发
以下是基于HDF框架的GPIO驱动开发示例,实现LED控制功能:
/*
* HDF GPIO LED驱动示例
* 文件:led_driver.c
* 功能:控制GPIO引脚实现LED开关
*/
#include "hdf_device_desc.h"
#include "hdf_log.h"
#include "gpio_if.h"
// LED连接的GPIO管脚定义
#define LED_GPIO_PIN 9
// 命令码定义
enum LedCmd {
LED_CMD_ON = 1,
LED_CMD_OFF = 2,
LED_CMD_TOGGLE = 3
};
// 驱动Dispatch接口:处理用户态发来的指令
static int32_t LedDriverDispatch(struct HdfDeviceIoClient *client,
int cmdId,
struct HdfSBuf *data,
struct HdfSBuf *reply)
{
int32_t ret;
switch (cmdId) {
case LED_CMD_ON:
// 低电平点亮LED(取决于电路设计)
ret = GpioWrite(LED_GPIO_PIN, GPIO_VAL_LOW);
HDF_LOGI("LED Driver: ON");
break;
case LED_CMD_OFF:
ret = GpioWrite(LED_GPIO_PIN, GPIO_VAL_HIGH);
HDF_LOGI("LED Driver: OFF");
break;
case LED_CMD_TOGGLE:
// 读取当前状态并反转
uint16_t currentVal;
GpioRead(LED_GPIO_PIN, ¤tVal);
GpioWrite(LED_GPIO_PIN, currentVal ? GPIO_VAL_LOW : GPIO_VAL_HIGH);
HDF_LOGI("LED Driver: TOGGLE");
break;
default:
HDF_LOGE("LED Driver: Unknown command %d", cmdId);
return HDF_ERR_NOT_SUPPORT;
}
return ret == HDF_SUCCESS ? HDF_SUCCESS : HDF_FAILURE;
}
// 驱动绑定接口
static int32_t HdfLedDriverBind(struct HdfDeviceObject *deviceObject)
{
static struct IDeviceIoService service = {
.Dispatch = LedDriverDispatch,
};
deviceObject->service = &service;
HDF_LOGI("HdfLedDriverBind success");
return HDF_SUCCESS;
}
// 驱动初始化接口
static int32_t HdfLedDriverInit(struct HdfDeviceObject *deviceObject)
{
int32_t ret;
// 初始化GPIO
ret = GpioRequest(LED_GPIO_PIN, 0);
if (ret != HDF_SUCCESS) {
HDF_LOGE("GPIO request failed: %d", ret);
return ret;
}
// 设置GPIO为输出模式
ret = GpioSetDir(LED_GPIO_PIN, GPIO_DIR_OUT);
if (ret != HDF_SUCCESS) {
HDF_LOGE("GPIO set dir failed: %d", ret);
GpioRelease(LED_GPIO_PIN, 0);
return ret;
}
// 默认关闭LED
GpioWrite(LED_GPIO_PIN, GPIO_VAL_HIGH);
HDF_LOGI("HdfLedDriverInit success, GPIO Pin: %d", LED_GPIO_PIN);
return HDF_SUCCESS;
}
// 驱动卸载接口
static void HdfLedDriverRelease(struct HdfDeviceObject *deviceObject)
{
if (deviceObject == NULL) {
return;
}
GpioRelease(LED"_GPIO_PIN, 0);
HDF_LOGI("HdfLedDriverRelease success");
}
// 定义驱动入口结构体
struct HdfDriverEntry g_ledDriverEntry = {
.moduleVersion = 1,
.moduleName = "HDF_LED_DRIVER",
.Init = HdfLedDriverInit,
.Bind = HdfLedDriverBind,
.Release = HdfLedDriverRelease,
};
// 注册驱动入口
HDF_INIT(g_ledDriverEntry);
3.3 ADC驱动开发
ADC驱动用于采集模拟传感器数据,在车载场景中常用于温度监测、电池电压检测等:
/*
* HDF ADC驱动示例
* 文件:adc_driver.c
* 功能:读取ADC通道的模拟电压值
*/
#include "hdf_adc_if.h"
#include "hdf_log.h"
#include "osal_io.h"
// ADC设备号和通道号定义
#define ADC_DEVICE_NUM 0
#define ADC_CHANNEL_NUM 5 // 对应GPIO_11
// ADC初始化配置
static int32_t AdcDriverInit(struct HdfDeviceObject *device)
{
HDF_LOGI("ADC Driver initializing...");
// ADC核心层驱动已在platform模块实现
// 这里主要完成业务层初始化
return HDF_SUCCESS;
}
// ADC数据读取接口
int32_t ReadAdcValue(uint32_t channel, uint32_t *value)
{
int32_t ret;
DevHandle handle;
if (value == NULL) {
HDF_LOGE("ADC value pointer is NULL");
return HDF_ERR_INVALID_PARAM;
}
// 打开ADC设备
handle = AdcOpen(ADC_DEVICE_NUM);
if (handle == NULL) {
HDF_LOGE("ADC open failed");
return HDF_ERR_NOT_SUPPORT;
}
// 读取ADC通道值
ret = AdcRead(handle, channel, value);
if (ret != HDF_SUCCESS) {
HDF_LOGE("ADC read failed: %d", ret);
AdcClose(handle);
return ret;
}
// 关闭ADC设备
AdcClose(handle);
return HDF_SUCCESS;
}
// 将ADC原始值转换为电压值(mV)
// 假设12位ADC,参考电压3.3V
uint32_t AdcRawToVoltage(uint32_t rawValue)
{
const uint32_t VREF_MV = 3300; // 3.3V参考电压
const uint32_t ADC_BITS = 4096; // 12位ADC
return (rawValue * VREF_MV) / ADC_BITS;
}
// 示例:读取NTC温度传感器
int32_t ReadNtcTemperature(uint32_t *temperature)
{
uint32_t adcValue;
uint32_t voltageMv;
float resistance;
// 读取ADC值
if (ReadAdcValue(ADC_CHANNEL_NUM, &adcValue) != HDF_SUCCESS) {
return HDF_FAILURE;
}
// 转换为电压值
voltageMv = AdcRawToVoltage(adcValue);
// NTC热敏电阻阻值计算(分压电路)
// R_ntc = R_series * Vout / (Vcc - Vout)
// 此处R_series = 10kΩ,Vcc = 3.3V
resistance = 10000.0f * voltageMv / (3300 - voltageMv);
// 使用Steinhart-Hart方程计算温度
// T = 1 / (1/T0 + 1/B * ln(R/R0))
const float B_COEFFICIENT = 3950.0f; // B值
const float R0 = 10000.0f; // 25°C时的阻值
const float T0 = 298.15f; // 25°C对应的开氏温度
*temperature = (uint32_t)(1.0f / (1.0f/T0 + logf(resistance/R0)/B_COEFFICIENT) - 273.15f);
HDF_LOGI("NTC Temperature: %u C", *temperature);
return HDF_SUCCESS;
}
3.4 PWM驱动开发
PWM输出常用于电机调速、LED亮度调节等场景:
/*
* PWM驱动示例
* 文件:pwm_driver.c
* 功能:生成PWM波形控制舵机或LED亮度
*/
#include "hdf_pwm_if.h"
#include "hdf_log.h"
// PWM配置参数
#define PWM_DEVICE_NUM 0
#define PWM_CHANNEL_NUM 0
#define PWM_FREQUENCY_HZ 50 // 50Hz用于舵机控制
#define PWM_DUTY_CYCLE_50 5000 // 50%占空比(单位:纳秒)
// PWM初始化
int32_t PwmDriverInit(void)
{
int32_t ret;
DevHandle handle;
// 打开PWM设备
handle = PwmOpen(PWM_DEVICE_NUM);
if (handle == NULL) {
HDF_LOGE("PWM open failed");
return HDF_ERR_NOT_SUPPORT;
}
// 配置PWM参数
struct PwmConfig config = {0};
config.period = 1000000000 / PWM_FREQUENCY_HZ; // 周期(纳秒)
config.duty = PWM_DUTY_CYCLE_50; // 占空比
config.polarity = PWM_NORMAL_POLARITY; // 正常极性
config.number = 0; // 脉冲个数,0表示连续输出
ret = PwmSetConfig(handle, &config);
if (ret != HDF_SUCCESS) {
HDF_LOGE("PWM set config failed: %d", ret);
PwmClose(handle);
return ret;
}
// 使能PWM输出
ret = PwmEnable(handle);
if (ret != HDF_SUCCESS) {
HDF_LOGE("PWM enable failed: %d", ret);
PwmClose(handle);
return ret;
}
HDF_LOGI("PWM Driver initialized successfully");
PwmClose(handle);
return HDF_SUCCESS;
}
// 控制舵机角度(0-180度)
// 舵机控制:50Hz,脉宽1ms-2ms对应0-180度
int32_t SetServoAngle(DevHandle handle, uint8_t angle)
{
int32_t ret;
struct PwmConfig config;
if (angle > 180) {
angle = 180;
}
// 计算脉宽:1ms + (angle/180 * 1ms)
// 基础脉宽1ms = 1000000ns,最大脉宽2ms = 2000000ns
uint32_t pulseWidth = 1000000 + (angle * 10000 / 180); // 纳秒
config.period = 20000000; // 50Hz周期:20ms
config.duty = pulseWidth;
config.polarity = PWM_NORMAL_POLARITY;
config.number = 0;
ret = PwmSetConfig(handle, &config);
if (ret != HDF_SUCCESS) {
HDF_LOGE("SetServoAngle failed: %d", ret);
return ret;
}
HDF_LOGI("Servo angle set to: %d", angle);
return HDF_SUCCESS;
}
四、LiteOS轻量级内核开发
4.1 任务管理
LiteOS的任务调度采用优先级抢占式调度算法,支持0~31共32个优先级(数值越小优先级越高),同时支持相同优先级任务的时间片轮转调度。
/*
* LiteOS任务管理示例
* 文件:liteos_task.c
* 功能:创建和管理多个任务实现车身控制逻辑
*/
#include "los_task.h"
#include "los_base.h"
#include "los_sys.h"
#include "hdf_log.h"
// 任务优先级定义
#define TASK_PRIORITY_HIGH 5
#define TASK_PRIORITY_MEDIUM 10
#define TASK_PRIORITY_LOW 15
// 任务堆栈大小定义
#define TASK_STACK_SIZE 0x1000 // 4KB堆栈
// 全局变量
static UINT32 g_ledTaskID;
static UINT32 g_canTaskID;
static UINT32 g_sensorTaskID;
// LED控制任务
UINT32 LedTaskEntry(UINT32 taskID)
{
UINT32 ret;
UINT32 count = 0;
HDF_LOGI("LED Task started, TaskID: %u", taskID);
while (1) {
// 任务逻辑:闪烁LED指示系统运行状态
count++;
// 每100次循环切换LED状态
if (count % 100 == 0) {
HDF_LOGI("LED Task running, count: %u", count);
// Toggle LED GPIO
}
// 延时100ms
ret = LOS_TaskDelay(100);
if (ret != LOS_OK) {
HDF_LOGE("LED Task delay failed: 0x%x", ret);
}
}
}
// CAN通信任务
UINT32 CanTaskEntry(UINT32 taskID)
{
UINT32 ret;
HDF_LOGI("CAN Task started, TaskID: %u", taskID);
while (1) {
// 任务逻辑:处理CAN总线消息
// 1. 接收CAN消息
// 2. 解析消息内容
// 3. 根据消息类型执行相应动作
// 模拟CAN消息处理
ProcessCanMessages();
// 延时50ms
ret = LOS_TaskDelay(50);
}
}
// 传感器采集任务
UINT32 SensorTaskEntry(UINT32 taskID)
{
UINT32 ret;
uint32_t temperature;
HDF_LOGI("Sensor Task started, TaskID: %u", taskID);
while (1) {
// 任务逻辑:周期采集传感器数据
// 1. 读取温度传感器
// 2. 读取电压传感器
// 3. 更新系统状态
ReadNtcTemperature(&temperature);
HDF_LOGI("Temperature: %u C", temperature);
// 延时1秒
ret = LOS_TaskDelay(1000);
}
}
// 任务创建函数
UINT32 CreateApplicationTasks(void)
{
UINT32 ret;
TSK_INIT_PARAM_S taskParam = {0};
// 初始化任务参数
taskParam.pfnTaskEntry = (TSK_ENTRY_FUNC)LedTaskEntry;
taskParam.uwStackSize = TASK_STACK_SIZE;
taskParam.pcName = "LED_Task";
taskParam.usTaskPrio = TASK_PRIORITY_HIGH;
taskParam.uwResved = LOS_TASK_STATUS_DETACHED;
// 创建LED任务
ret = LOS_TaskCreate(&g_ledTaskID, &taskParam);
if (ret != LOS_OK) {
HDF_LOGE("Create LED Task failed: 0x%x", ret);
return ret;
}
HDF_LOGI("LED Task created, TaskID: %u", g_ledTaskID);
// 创建CAN通信任务
taskParam.pfnTaskEntry = (TSK_ENTRY_FUNC)CanTaskEntry;
taskParam.pcName = "CAN_Task";
taskParam.usTaskPrio = TASK_PRIORITY_MEDIUM;
ret = LOS_TaskCreate(&g_canTaskID, &taskParam);
if (ret != LOS_OK) {
HDF_LOGE("Create CAN Task failed: 0x%x", ret);
return ret;
}
HDF_LOGI("CAN Task created, TaskID: %u", g_canTaskID);
// 创建传感器任务
taskParam.pfnTaskEntry = (TSK_ENTRY_FUNC)SensorTaskEntry;
taskParam.pcName = "Sensor_Task";
taskParam.usTaskPrio = TASK_PRIORITY_LOW;
ret = LOS_TaskCreate(&g_sensorTaskID, &taskParam);
if (ret != LOS_OK) {
HDF_LOGE("Create Sensor Task failed: 0x%x", ret);
return ret;
}
HDF_LOGI("Sensor Task created, TaskID: %u", g_sensorTaskID);
return LOS_OK;
}
4.2 内存管理
LiteOS提供静态内存管理和动态内存管理两种方式:
/*
* LiteOS内存管理示例
* 文件:liteos_memory.c
*/
#include "los_memory.h"
#include "los_sys.h"
#include "hdf_log.h"
// 动态内存池配置
#define MEMORY_POOL_SIZE 0x8000 // 32KB内存池
static CHAR g_memoryPool[MEMORY_POOL_SIZE];
// 内存池初始化
UINT32 MemoryPoolInit(void)
{
UINT32 ret;
// 初始化动态内存池
ret = LOS_MemInit(g_memoryPool, MEMORY_POOL_SIZE);
if (ret != LOS_OK) {
HDF_LOGE("Memory pool init failed: 0x%x", ret);
return ret;
}
HDF_LOGI("Memory pool initialized, size: %u bytes", MEMORY_POOL_SIZE);
return LOS_OK;
}
// 动态内存分配示例
UINT32 DynamicMemoryDemo(void)
{
UINT32 ret;
UINTPTR memPtr;
// 分配1KB内存
memPtr = LOS_MemAlloc(g_memoryPool, 1024);
if (memPtr == NULL) {
HDF_LOGE("Memory alloc failed");
return LOS_ERRNO_MALLOC_NO_MEMORY;
}
HDF_LOGI("Memory allocated at: 0x%x", memPtr);
// 写入数据
CHAR *pData = (CHAR *)memPtr;
for (int i = 0; i < 256; i++) {
pData[i] = (CHAR)(i & 0xFF);
}
// 使用完后释放内存
ret = LOS_MemFree(g_memoryPool, (VOID *)memPtr);
if (ret != LOS_OK) {
HDF_LOGE("Memory free failed: 0x%x", ret);
return ret;
}
HDF_LOGI("Memory freed successfully");
return LOS_OK;
}
// 内存信息查询
VOID PrintMemoryInfo(void)
{
LOS_MemInfo memoryInfo;
if (LOS_MemInfoGet(g_memoryPool, &memoryInfo) == LOS_OK) {
HDF_LOGI("=== Memory Info ===");
HDF_LOGI("Total Size: %u bytes", memoryInfo.totalSize);
HDF_LOGI("Used Size: %u bytes", memoryInfo.usedSize);
HDF_LOGI("Free Size: %u bytes", memoryInfo.freeSize);
HDF_LOGI("Usage: %u%%",
(memoryInfo.usedSize * 100) / memoryInfo.totalSize);
}
}
4.3 中断与定时器
/*
* LiteOS中断与定时器示例
* 文件:liteos_interrupt_timer.c
*/
#include "los_interrupt.h"
#include "los_hwi.h"
#include "los_basedep.h"
#include "hdf_log.h"
// 定时器定义
static TIMER_HANDLE g_heartbeatTimer;
// 定时器回调函数
static VOID HeartbeatTimerCallback(UINT32 arg)
{
static uint32_t heartbeatCount = 0;
heartbeatCount++;
HDF_LOGI("Heartbeat: %u", heartbeatCount);
// 可以在这里触发CAN消息心跳包
// SendCanHeartbeat();
}
// 硬件中断处理函数
UINT32 InterruptHandler(UINT32 irqNum)
{
HDF_LOGI("Interrupt triggered, IRQ number: %u", irqNum);
// 清除中断标志
// 读取中断状态寄存器
// 处理具体外设中断
return LOS_OK;
}
// 中断初始化
UINT32 InterruptInit(UINT32 irqNum)
{
UINT32 ret;
// 创建中断映射
// 注意:LiteOS中irqNum为中断号,需要与具体硬件对应
ret = LOS_HwiCreate(irqNum, 0, 0, InterruptHandler, NULL);
if (ret != LOS_OK) {
HDF_LOGE("HWI create failed: 0x%x", ret);
return ret;
}
// 使能中断
ret = LOS_HwiEnable(irqNum);
if (ret != LOS_OK) {
HDF_LOGE("HWI enable failed: 0x%x", ret);
return ret;
}
HDF_LOGI("Interrupt initialized, IRQ: %u", irqNum);
return LOS_OK;
}
// 定时器初始化
UINT32 TimerInit(VOID)
{
UINT32 ret;
UINT32 timerArg = 0;
// 创建周期定时器
ret = LOS_TimerCreate(&g_heartbeatTimer,
LOS_MS_TO_TICK(1000), // 1秒周期
HeartbeatTimerCallback,
timerArg,
0); // 0=周期定时器,1=单次定时器
if (ret != LOS_OK) {
HDF_LOGE("Timer create failed: 0x%x", ret);
return ret;
}
// 启动定时器
ret = LOS_TimerStart(g_heartbeatTimer);
if (ret != LOS_OK) {
HDF_LOGE("Timer start failed: 0x%x", ret);
return ret;
}
HDF_LOGI("Heartbeat timer started");
return LOS_OK;
}
五、完整实战案例:车身控制模块
以下是整合了灯光控制、CAN通信、OTA升级的完整车身控制模块代码:
/*
* 鸿蒙MCU车身控制模块完整示例
* 文件:body_control_module.c
* 功能:灯光控制 + CAN通信 + OTA升级
*/
#include "los_task.h"
#include "los_memory.h"
#include "los_queue.h"
#include "gpio_if.h"
#include "hdf_log.h"
#include "hdf_adc_if.h"
#include "ota_api.h"
// ==================== 宏定义 ====================
#define BCM_TASK_PRIORITY 10
#define BCM_TASK_STACK_SIZE 0x2000
#define CAN_TX_TASK_PRIORITY 8
#define CAN_RX_TASK_PRIORITY 9
#define LIGHT_CMD_OFF 0x00
#define LIGHT_CMD_ON 0x01
#define LIGHT_CMD_BRAKE 0x02
#define LIGHT_CMD_TURN_LEFT 0x03
#define LIGHT_CMD_TURN_RIGHT 0x04
// CAN消息ID定义
#define CAN_MSG_ID_LIGHT_CTRL 0x100
#define CAN_MSG_ID_STATUS_REPORT 0x200
#define CAN_MSG_ID_OTA_CMD 0x300
// ==================== 类型定义 ====================
typedef enum {
LIGHT_STATE_OFF,
LIGHT_STATE_ON,
LIGHT_STATE_BRAKE,
LIGHT_STATE_LEFT_BLINK,
LIGHT_STATE_RIGHT_BLINK
} LightState;
typedef struct {
uint8_t frontLight : 1;
uint8_t rearLight : 1;
uint8_t brakeLight : 1;
uint8_t leftSignal : 1;
uint8_t rightSignal : 1;
uint8_t reserved : 3;
} LightStatus;
typedef struct {
uint32_t canId;
uint8_t data[8];
uint8_t dlc;
} CanMessage;
typedef struct {
uint16_t version;
uint16_t command;
uint32_t param1;
uint32_t param2;
} OtaCommand;
// ==================== 全局变量 ====================
static UINT32 g_bcmTaskID;
static UINT32 g_canTxTaskID;
static UINT32 g_canRxTaskID;
static LightStatus g_lightStatus;
static uint8_t g_blinkCounter = 0;
// 消息队列
static UINT32 g_canRxQueue;
// ==================== 灯光控制驱动 ====================
static int32_t LightDriverInit(void)
{
// 初始化各路灯光GPIO
GpioRequest(FRONT_LIGHT_GPIO, 0);
GpioSetDir(FRONT_LIGHT_GPIO, GPIO_DIR_OUT);
GpioWrite(FRONT_LIGHT_GPIO, GPIO_VAL_HIGH); // 默认关闭
GpioRequest(REAR_LIGHT_GPIO, 0);
GpioSetDir(REAR_LIGHT_GPIO, GPIO_DIR_OUT);
GpioWrite(REAR_LIGHT_GPIO, GPIO_VAL_HIGH);
GpioRequest(BRAKE_LIGHT_GPIO, 0);
GpioSetDir(BRAKE_LIGHT_GPIO, GPIO_DIR_OUT);
GpioWrite(BRAKE_LIGHT_GPIO, GPIO_VAL_HIGH);
HDF_LOGI("Light driver initialized");
return HDF_SUCCESS;
}
static void SetLightState(LightState state)
{
g_blinkCounter = 0;
switch (state) {
case LIGHT_STATE_OFF:
g_lightStatus.frontLight = 0;
g_lightStatus.rearLight = 0;
g_lightStatus.brakeLight = 0;
g_lightStatus.leftSignal = 0;
g_lightStatus.rightSignal = 0;
break;
case LIGHT_STATE_ON:
g_lightStatus.frontLight = 1;
g_lightStatus.rearLight = 1;
g_lightStatus.brakeLight = 0;
g_lightStatus.leftSignal = 0;
g_lightStatus.rightSignal = 0;
break;
case LIGHT_STATE_BRAKE:
g_lightStatus.brakeLight = 1;
g_lightStatus.rearLight = 1;
break;
case LIGHT_STATE_LEFT_BLINK:
g_lightStatus.leftSignal = 1;
g_lightStatus.rightSignal = 0;
break;
case LIGHT_STATE_RIGHT_BLINK:
g_lightStatus.rightSignal = 1;
g_lightStatus.leftSignal = 0;
break;
}
// 输出到GPIO
GpioWrite(FRONT_LIGHT_GPIO, g_lightStatus.frontLight ? GPIO_VAL_LOW : GPIO_VAL_HIGH);
GpioWrite(REAR_LIGHT_GPIO, g_lightStatus.rearLight ? GPIO_VAL_LOW : GPIO_VAL_HIGH);
GpioWrite(BRAKE_LIGHT_GPIO, g_lightStatus.brakeLight ? GPIO_VAL_LOW : GPIO_VAL_HIGH);
GpioWrite(LEFT_SIGNAL_GPIO, g_lightStatus.leftSignal ? GPIO_VAL_LOW : GPIO_VAL_HIGH);
GpioWrite(RIGHT_SIGNAL_GPIO, g_lightStatus.rightSignal ? GPIO_VAL_LOW : GPIO_VAL_HIGH);
}
static void ToggleBlinkLights(void)
{
g_blinkCounter++;
if (g_blinkCounter >= 10) {
g_blinkCounter = 0;
if (g_lightStatus.leftSignal) {
GpioWrite(LEFT_SIGNAL_GPIO, !g_lightStatus.leftSignal);
g_lightStatus.leftSignal = 0;
} else if (g_lightStatus.rightSignal) {
GpioWrite(RIGHT_SIGNAL_GPIO, !g_lightStatus.rightSignal);
g_lightStatus.rightSignal = 0;
}
}
}
// ==================== CAN通信模块 ====================
static int32_t CanSendMessage(CanMessage *msg)
{
// 实际实现需要调用CAN驱动
// 这里简化处理
HDF_LOGI("CAN TX: ID=0x%03X, DLC=%d, Data=[%02X %02X %02X %02X...]",
msg->canId, msg->dlc,
msg->data[0], msg->data[1], msg->data[2], msg->data[3]);
return HDF_SUCCESS;
}
static int32_t CanReceiveMessage(CanMessage *msg)
{
// 从CAN接收缓冲区读取消息
// 这里简化处理,返回模拟数据
msg->canId = CAN_MSG_ID_LIGHT_CTRL;
msg->dlc = 2;
msg->data[0] = LIGHT_CMD_ON;
msg->data[1] = 0;
return HDF_SUCCESS;
}
static void ProcessCanMessage(CanMessage *msg)
{
switch (msg->canId) {
case CAN_MSG_ID_LIGHT_CTRL:
// 处理灯光控制命令
switch (msg->data[0]) {
case LIGHT_CMD_OFF:
SetLightState(LIGHT_STATE_OFF);
break;
case LIGHT_CMD_ON:
SetLightState(LIGHT_STATE_ON);
break;
case LIGHT_CMD_BRAKE:
SetLightState(LIGHT_STATE_BRAKE);
break;
case LIGHT_CMD_TURN_LEFT:
SetLightState(LIGHT_STATE_LEFT_BLINK);
break;
case LIGHT_CMD_TURN_RIGHT:
SetLightState(LIGHT_STATE_RIGHT_BLINK);
break;
}
break;
case CAN_MSG_ID_OTA_CMD:
// 处理OTA升级命令
OtaCommand *otaCmd = (OtaCommand *)msg->data;
HDF_LOGI("OTA Command: Ver=%u, Cmd=%u",
otaCmd->version, otaCmd->command);
HandleOtaCommand(otaCmd);
break;
default:
HDF_LOGW("Unknown CAN message ID: 0x%03X", msg->canId);
break;
}
}
// CAN接收任务
UINT32 CanRxTaskEntry(UINT32 taskID)
{
CanMessage msg;
HDF_LOGI("CAN RX Task started");
while (1) {
// 接收CAN消息
if (CanReceiveMessage(&msg) == HDF_SUCCESS) {
ProcessCanMessage(&msg);
}
// 延时10ms
LOS_TaskDelay(10);
}
}
// CAN发送任务:定期上报状态
UINT32 CanTxTaskEntry(UINT32 taskID)
{
CanMessage msg;
HDF_LOGI("CAN TX Task started");
while (1) {
// 构造状态上报消息
msg.canId = CAN_MSG_ID_STATUS_REPORT;
msg.dlc = 3;
msg.data[0] = g_lightStatus.frontLight;
msg.data[1] = g_lightStatus.rearLight | (g_lightStatus.brakeLight << 1);
msg.data[2] = g_lightStatus.leftSignal | (g_lightStatus.rightSignal << 1);
CanSendMessage(&msg);
// 延时100ms
LOS_TaskDelay(100);
}
}
// ==================== OTA升级模块 ====================
static uint32_t g_otaVersion = 0x0100; // V1.0.0
static uint8_t g_otaInProgress = 0;
int32_t HandleOtaCommand(OtaCommand *cmd)
{
switch (cmd->command) {
case 0x01: // 开始升级
HDF_LOGI("OTA: Start upgrade to version %u", cmd->param1);
g_otaInProgress = 1;
// 准备接收固件数据
OtaPrepareFlash();
break;
case 0x02: // 接收固件数据块
if (!g_otaInProgress) {
HDF_LOGE("OTA: Not in upgrade mode");
return HDF_FAILURE;
}
// 写入固件数据
OtaWriteFlash(cmd->param1, cmd->param2);
break;
case 0x03: // 校验固件
if (OtaVerifyFlash() == HDF_SUCCESS) {
HDF_LOGI("OTA: Verification passed");
} else {
HDF_LOGE("OTA: Verification failed");
OtaRollback();
}
break;
case 0x04: // 应用升级
HDF_LOGI("OTA: Applying upgrade");
OtaApply();
break;
default:
HDF_LOGE("OTA: Unknown command 0x%02X", cmd->command);
return HDF_FAILURE;
}
return HDF_SUCCESS;
}
// 简化OTA函数实现
static void OtaPrepareFlash(void) {
HDF_LOGI("OTA: Preparing flash for upgrade");
}
static void OtaWriteFlash(uint32_t offset, uint32_t size) {
HDF_LOGI("OTA: Writing %u bytes at offset %u", size, offset);
}
static int32_t OtaVerifyFlash(void) {
HDF_LOGI("OTA: Verifying flash");
return HDF_SUCCESS;
}
static void OtaRollback(void) {
HDF_LOGI("OTA: Rolling back to previous version");
}
static void OtaApply(void) {
HDF_LOGI("OTA: Applying new firmware");
g_otaVersion++;
g_otaInProgress = 0;
}
// ==================== BCM主任务 ====================
UINT32 BcmTaskEntry(UINT32 taskID)
{
HDF_LOGI("BCM Task started, version: 0x%04X", g_otaVersion);
// 初始化灯光驱动
LightDriverInit();
// 初始化CAN通信
CanDriverInit();
// 初始状态:所有灯光关闭
SetLightState(LIGHT_STATE_OFF);
while (1) {
// 处理闪烁灯切换
if (g_lightStatus.leftSignal || g_lightStatus.rightSignal) {
ToggleBlinkLights();
}
// 延时100ms
LOS_TaskDelay(100);
}
}
// ==================== 应用入口 ====================
UINT32 AppInit(VOID)
{
UINT32 ret;
TSK_INIT_PARAM_S taskParam = {0};
HDF_LOGI("=== Body Control Module Starting ===");
// 创建BCM主任务
taskParam.pfnTaskEntry = (TSK_ENTRY_FUNC)BcmTaskEntry;
taskParam.uwStackSize = BCM_TASK_STACK_SIZE;
taskParam.pcName = "BCM_Main";
taskParam.usTaskPrio = BCM_TASK_PRIORITY;
taskParam.uwResved = LOS_TASK_STATUS_DETACHED;
ret = LOS_TaskCreate(&g_bcmTaskID, &taskParam);
if (ret != LOS_OK) {
HDF_LOGE("Create BCM Task failed: 0x%x", ret);
return ret;
}
// 创建CAN接收任务
taskParam.pfnTaskEntry = (TSK_ENTRY_FUNC)CanRxTaskEntry;
taskParam.pcName = "CAN_RX";
taskParam.usTaskPrio = CAN_RX_TASK_PRIORITY;
ret = LOS_TaskCreate(&g_canRxTaskID, &taskParam);
if (ret != LOS_OK) {
HDF_LOGE("Create CAN RX Task failed: 0x%x", ret);
return ret;
}
// 创建CAN发送任务
taskParam.pfnTaskEntry = (TSK_ENTRY_FUNC)CanTxTaskEntry;
taskParam.pcName = "CAN_TX";
taskParam.usTaskPrio = CAN_TX_TASK_PRIORITY;
ret = LOS_TaskCreate(&g_canTxTaskID, &taskParam);
if (ret != LOS_OK) {
HDF_LOGE("Create CAN TX Task failed: 0x%x", ret);
return ret;
}
HDF_LOGI("=== All tasks created successfully ===");
return LOS_OK;
}
六、开发流程与调试
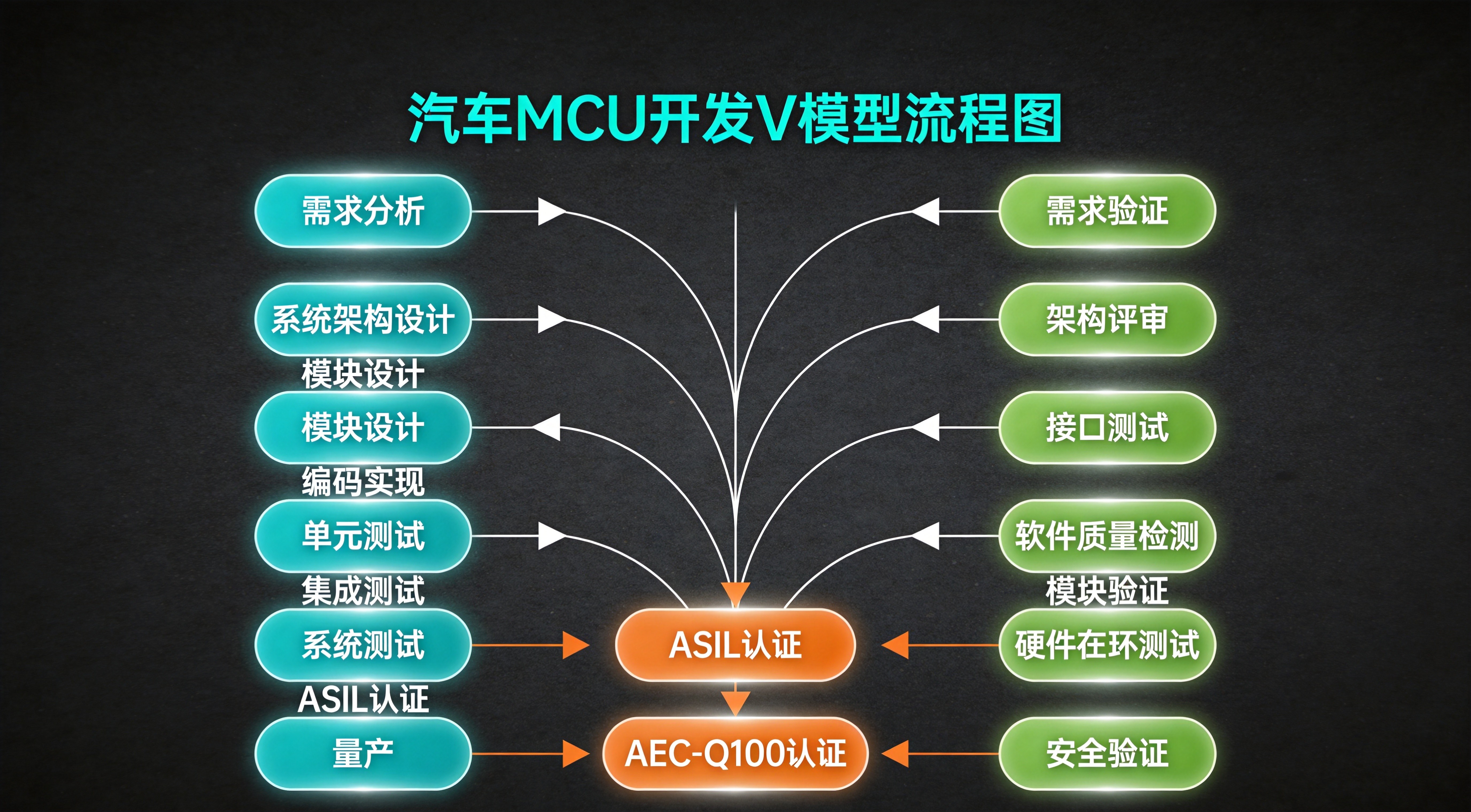
图2:鸿蒙MCU开发流程图
图2展示了从环境搭建到OTA发布的完整开发链路。整个开发流程分为六个主要阶段:
- 环境搭建:安装DevEco Device Tool、下载SDK、配置工具链
- HDF驱动开发:基于硬件抽象层开发GPIO、ADC、I2C、PWM等驱动
- LiteOS内核开发:创建任务、配置内存管理、设置中断和定时器
- 应用开发:实现CAN通信、车身控制逻辑、状态机设计
- 联调测试:使用JTAG调试、串口监控、CAN分析仪进行验证
- OTA发布:签名打包、云端上传、远程升级部署
七、鸿蒙车载生态与展望
7.1 生态合作格局
鸿蒙智行已形成"五界"格局:
- 问界:华为深度参与的智选车模式
- 智界:与奇瑞合作
- 享界:与北汽合作
- 尊界:与江汽合作
- 尚界:与上汽合作
这种"联邦制"生态模式使华为既能保持核心技术掌控力,又让车企保留品牌差异化的空间。采用鸿蒙方案的车型开发周期从36个月缩短至18个月,研发费用降低2.8亿元。
7.2 AUTOSAR适配路径
鸿蒙车载系统支持与经典AUTOSAR的混合架构设计:
| AUTOSAR模块 | 鸿蒙扩展API | 升级优势 |
|---|---|---|
| 通信管理 | HOS_ComSendPacket | 支持IP分组交换 |
| 诊断服务 | HOS_DiagGetSessionContext | 支持OTA在线诊断 |
| 存储管理 | HOS_StorageWrite | 支持安全存储 |
7.3 未来展望
随着HarmonySpace 6的发布和MoLA多模态智能体架构的应用,鸿蒙车载系统正在实现从"智能车机工具"到"有温度的全场景出行伙伴"的本质跃迁。舱驾一体、卫星通信、星闪技术等创新将进一步融入车载生态,为开发者带来更多可能性。
在这个万物互联的时代,掌握鸿蒙车载MCU开发技术,就是掌握通往未来智能出行的钥匙。

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐


 0
0 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)