
鸿蒙6.0电子手表高山攀登指标监测功能开发实战
本项目基于鸿蒙6.0(HarmonyOS NEXT)开发了一款面向高山攀登的专业智能手表系统。针对户外运动场景的特殊需求,系统整合了气压传感器、PPG光学传感器、温度传感器等多源数据,实现了海拔高度实时计算(采用国际标准大气模型算法)、血氧饱和度监测(基于朗伯-比尔定律的光谱分析)、环境参数采集等核心功能。系统采用三层架构设计,通过HDF驱动框架标准化传感器调用,并利用HarmonyOS的分布式能
一、项目背景
随着户外运动热潮的兴起,高山攀登已成为越来越多探险爱好者的首选挑战。然而,复杂多变的山地环境对攀登者的身体状态监测提出了极高要求——海拔变化会直接影响血氧饱和度,气温骤降可能导致体温失调,而紫外线辐射在高原地区尤为强烈。传统手表难以满足这些专业需求,因此基于鸿蒙6.0(HarmonyOS NEXT)开发一款具备专业高山攀登指标监测功能的智能手表具有重要实用价值。
本项目旨在充分利用手表端丰富的传感器资源,实现以下核心功能:基于气压传感器的海拔高度实时测量、血氧饱和度(SpO2)连续监测、心率变异性分析、环境温度采集、攀登配速与垂直速度计算,以及紫外线指数监测。通过HarmonyOS NEXT的分布式能力,这些数据还可与手机端应用协同,实现更全面的攀登数据分析与安全预警。
二、系统架构设计
整体架构采用经典的三层分离设计,确保各模块职责清晰、便于维护:
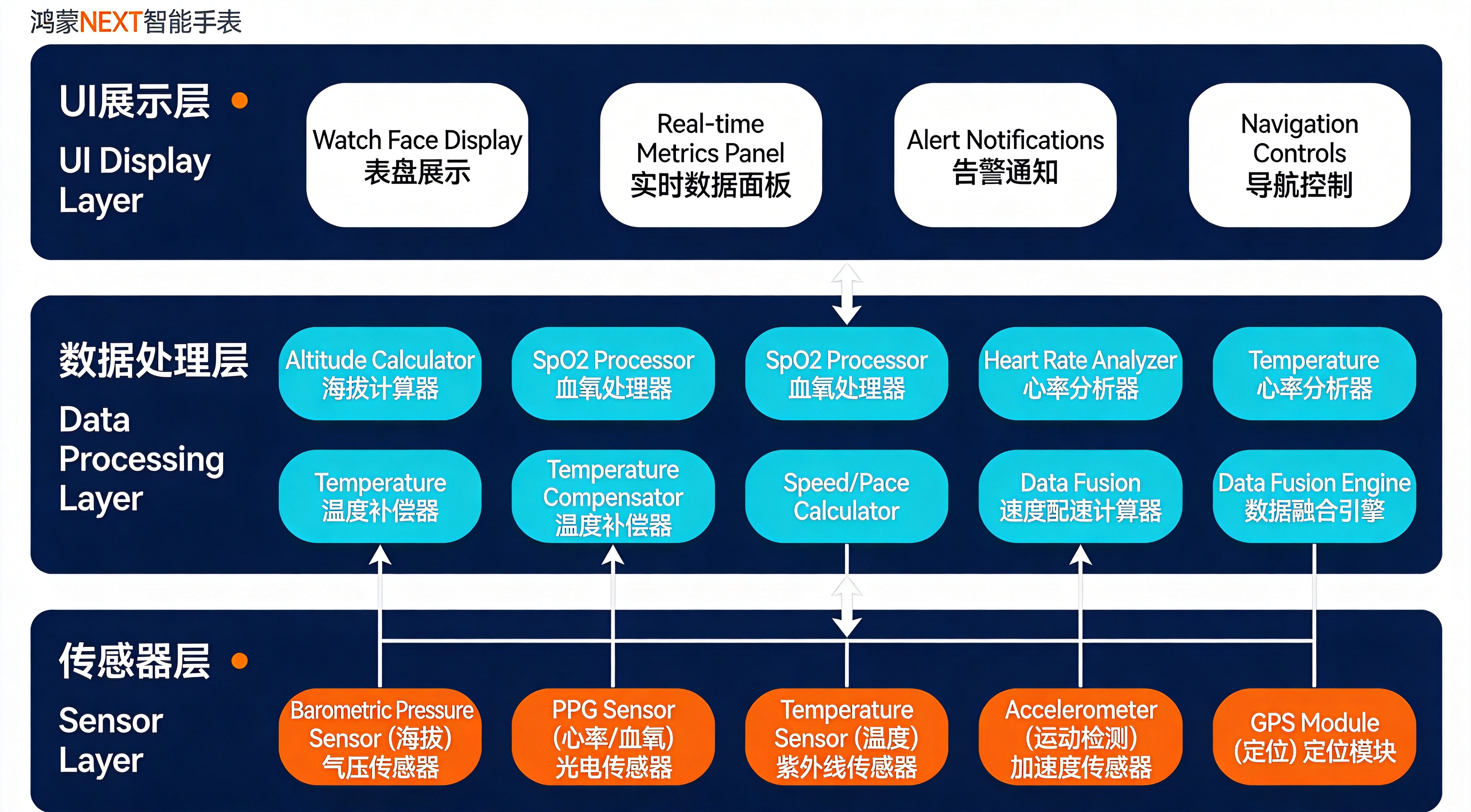
传感器层负责原始数据采集,包括气压传感器(获取环境气压计算海拔)、PPG光学传感器(采集光电容积脉搏波信号用于心率和血氧计算)、温度传感器(环境与皮肤温度监测)、UV传感器(紫外线强度检测)、加速度计(运动状态识别)以及GPS模块(地理定位)。
数据处理层是系统的核心智能中枢,承担传感器数据滤波校准、算法计算(如海拔换算公式、血氧比例算法)、多传感器数据融合以及阈值比对与告警逻辑。该层采用观察者模式设计,允许UI层灵活订阅感兴趣的数据指标。
UI展示层负责数据可视化呈现,包括实时表盘数据展示、告警信息推送、历史数据曲线以及用户交互响应。HarmonyOS NEXT提供了专为轻量设备优化的ArkUI声明式框架,非常适合手表端界面开发。
三、传感器接口开发
HarmonyOS NEXT引入了HDF(Hardware Driver Foundation)驱动框架,为传感器调用提供了统一的标准化接口。以下是气压传感器订阅的完整实现:
// 气压传感器管理器
import sensor from '@ohos.sensor';
// 传感器数据回调接口定义
interface BarometerCallback {
onDataChange(pressure: number, timestamp: number): void;
onError(error: Error): void;
}
// 气压传感器管理类
class BarometerSensorManager {
private sensorId: number = -1;
private callback: BarometerCallback | null = null;
// 订阅气压传感器数据
subscribe(callback: BarometerCallback): void {
this.callback = callback;
// 注册气压传感器监听器
sensor.on(sensor.SensorType.SENSOR_TYPE_PRESSURE, (data) => {
if (this.callback) {
// data.pressure 单位为 hPa(百帕)
this.callback.onDataChange(data.pressure, Date.now());
}
}, {
// 采样频率:100ms一次,高山场景需要较高采样率
interval: 100000000, // 纳秒单位
sensorFlags: 0
});
}
// 取消订阅
unsubscribe(): void {
if (this.sensorId !== -1) {
sensor.off(sensor.SensorType.SENSOR_TYPE_PRESSURE);
this.sensorId = -1;
}
this.callback = null;
}
}
实战心得:在手表端开发时,传感器订阅的采样频率需要在精度和功耗之间取得平衡。实测发现,100ms采样间隔能够捕捉气压快速变化,同时不会造成明显的续航衰减。对于气压传感器,建议开启高精度模式,虽然功耗略有上升,但对海拔计算精度提升显著。
四、核心功能实现
4.1 海拔高度计算
气压法测量海拔基于国际标准大气模型(ISA),核心原理是:海拔每升高9米,大气压下降约1hPa。系统采用Barometric Formula进行精确计算:
// 海拔计算工具类
class AltitudeCalculator {
// 海平面标准气压(hPa)
private static readonly SEA_LEVEL_PRESSURE: number = 1013.25;
// 气压高度公式常数
private static readonly CONSTANT_L: number = 0.0065; // 温度递减率 (K/m)
private static readonly CONSTANT_M: number = 0.0289644; // 干空气摩尔质量 (kg/mol)
private static readonly CONSTANT_R: number = 8.31447; // 通用气体常数 (J/(mol·K))
private static readonly CONSTANT_G: number = 9.80665; // 标准重力加速度 (m/s²)
/**
* 根据气压计算海拔高度
* @param pressure 当前气压 (hPa)
* @param seaLevelPressure 海平面气压 (hPa),可校准
* @param temperature 当前温度 (摄氏度)
* @returns 海拔高度 (米)
*/
static calculate(pressure: number, seaLevelPressure: number = this.SEA_LEVEL_PRESSURE,
temperature: number = 15): number {
// 修正温度到绝对温标
const tempKelvin = temperature + 273.15;
// Barometric Formula 推导
// h = (T0/L) * [1 - (P/P0)^(RLg/ML)]
const exponent = (this.CONSTANT_R * this.CONSTANT_G) /
(this.CONSTANT_L * this.CONSTANT_M);
const ratio = Math.pow(pressure / seaLevelPressure, 1 / exponent);
const altitude = (tempKelvin / this.CONSTANT_L) *1 - ratio);
return Math.round(altitude * 10) / 10; // 保留一位小数
}
/**
* 获取初始校准气压(开机时调用)
*/
static async calibrateSeaLevelPressure(): Promise<number> {
return new Promise((resolve) => {
sensor.once(sensor.SensorType.SENSOR_TYPE_PRESSURE, (data) => {
resolve(data.pressure);
});
});
}
}
常见问题解决方案:
- 气压漂移:山区天气变化剧烈,建议每500米手动校准一次海平面气压
- 突变异常:增加卡尔曼滤波器平滑数据,避免短暂气压波动导致海拔跳变
- GPS辅助:当GPS信号良好时,可结合GPS高度进行二次校准
4.2 血氧饱和度监测
PPG传感器通过检测血液对红外光和红光的吸收差异来计算SpO2。核心算法基于朗伯-比尔定律:
// 血氧饱和度计算引擎
class SpO2Engine {
// PPG信号采样参数
private sampleRate: number = 50; // 50Hz采样
private windowSize: number = 250; // 5秒窗口(250个采样点)
// 存储原始PPG数据
private redBuffer: number[] = [];
private irBuffer: number[] = [];
/**
* 输入PPG原始数据
* @param redValue 红光传感器值 (660nm)
* @param irValue 红外光传感器值 (940nm)
*/
pushData(redValue: number, irValue: number): void {
this.redBuffer.push(redValue);
this.irBuffer.push(irValue);
// 保持固定窗口大小
if (this.redBuffer.length > this.windowSize) {
this.redBuffer.shift();
this.irBuffer.shift();
}
}
/**
* 计算血氧饱和度
* @returns SpO2百分比值 (0-100)
*/
calculate(): number {
if (this.redBuffer.length < this.windowSize) {
return -1; // 数据不足
}
// 1. 提取交流成分(通过高通滤波)
const redAC = this.extractACComponent(this.redBuffer);
const irAC = this.extractACComponent(this.irBuffer);
// 2. 计算直流成分(通过低通滤波)
const redDC = this.extractDCComponent(this.redBuffer);
const irDC = this.extractDCComponent(this.irBuffer);
// 3. 计算红光/红外光交流幅值比
const ratioR = this.calculateRatio(redAC, redDC);
const ratioIR = this.calculateRatio(irAC, irDC);
// 4. SpO2计算公式(经验公式)
// 不同厂商传感器系数可能不同,需根据实际硬件调优
const spO2 = 110 - 25 * (ratioR / ratioIR);
return Math.max(70, Math.min(100, Math.round(spO2)));
}
// 交流成分提取(高通滤波)
private extractACComponent(signal: number[]): number {
// 简化实现:使用滑动平均作baseline,然后用原信号减去baseline
const baseline = this.movingAverage(signal, 25);
const ac = signal.map((v, i) => v - baseline[i]);
return Math.max(...ac.map(Math.abs));
}
// 直流成分提取(低通滤波)
private extractDCComponent(signal: number[]): number {
const baseline = this.movingAverage(signal, 25);
return this.movingAverage(baseline, 10)[0];
}
// 比率计算
private calculateRatio(ac: number, dc: number): number {
return dc > 0 ? ac / dc : 0;
}
// 滑动平均
private movingAverage(data: number[], window: number): number[] {
const result: number[] = [];
for (let i = 0; i < data.length; i++) {
const start = Math.max(0, i - window + 1);
const subset = data.slice(start, i + 1);
result.push(subset.reduce((a, b) => a + b, 0) / subset.length);
}
return result;
}
}
实战经验:PPG信号极易受运动干扰,高山攀登时的手臂摆动会产生严重伪影。建议集成三轴加速度数据,当检测到剧烈运动时暂停SpO2计算或加大滤波强度。另外,手腕佩戴松紧度对信号质量影响极大,建议在UI中增加佩戴检测提示。
4.3 攀登配速与垂直速度
// 攀登状态计算器
class ClimbingMetrics {
private altitudeHistory: { alt: number; time: number }[] = [];
private gpsHistory: { lat: number; lon: number; time: number }[] = [];
private static readonly HISTORY_DURATION = 300000; // 保留5分钟历史数据
/**
* 更新位置数据
*/
updateLocation(latitude: number, longitude: number, altitude: number): void {
const now = Date.now();
this.altitudeHistory.push({ alt: altitude, time: now });
this.gpsHistory.push({ lat: latitude, lon: longitude, time: now });
// 清理过期数据
this.cleanExpiredData(now);
}
/**
* 计算垂直速度(米/小时)
*/
calculateVerticalSpeed(): number {
if (this.altitudeHistory.length < 2) return 0;
const recent = this.altitudeHistory.slice(-10);
const first = recent[0];
const last = recent[recent.length - 1];
const altChange = last.alt - first.alt;
const timeChange = (last.time - first.time) / 3600000; // 转换为小时
if (timeChange < 0.001) return 0; // 避免除零
return Math.round((altChange / timeChange) * 10) / 10;
}
/**
* 计算水平配速(分钟/公里)
*/
calculateHorizontalPace(): number {
if (this.gpsHistory.length < 2) return 0;
let totalDistance = 0;
for (let i = 1; i < this.gpsHistory.length; i++) {
totalDistance += this.haversineDistance(
this.gpsHistory[i-1].lat, this.gpsHistory[i-1].lon,
this.gpsHistory[i].lat, this.gpsHistory[i].lon
);
}
const duration = (this.gpsHistory[this.gpsHistory.length - 1].time -
this.gpsHistory[0].time) / 3600000; // 小时
if (duration < 0.001 || totalDistance < 1) return 0;
const paceMinutesPerKm = (duration * 60) / (totalDistance / 1000);
return Math.round(paceMinutesPerKm * 10) / 10;
}
// Haversine公式计算两点间距离(米)
private haversineDistance(lat1: number, lon1: number,
lat2: number, lon2: number): number {
const R = 6371000; // 地球半径(米)
const dLat = this.toRad(lat2 - lat1);
const dLon = this.toRad(lon2 - lon1);
const a = Math.sin(dLat/2) * Math.sin(dLat/2) +
Math.cos(this.toRad(lat1)) * Math.cos(this.toRad(lat2)) *
Math.sin(dLon/2) * Math.sin(dLon/2);
const c = 2 * Math.atan2(Math.sqrt(a), Math.sqrt(1-a));
return R * c;
}
private toRad(deg: number): number {
return deg * Math.PI / 180;
}
private cleanExpiredData(now: number): void {
const threshold = now - this.HISTORY_DURATION;
this.altitudeHistory = this.altitudeHistory.filter(h => h.time > threshold);
this.gpsHistory = this.gpsHistory.filter(h => h.time > threshold);
}
}
五、UI界面设计
手表端采用ArkUI声明式开发,表盘设计遵循信息分层原则——核心数据(海拔、心率)采用大字号突出显示,次要数据以小字号或图标形式呈现。以下是核心界面组件实现:
// 攀登数据卡片组件
@Entry
@Component
struct ClimbingDashboard {
@State currentAltitude: number = 0;
@State spO2: number = 98;
@State heartRate: number = 72;
@State temperature: number = 15;
@State uvIndex: number = 3;
@State verticalSpeed: number = 0;
private timerId: number = -1;
aboutToAppear() {
// 初始化传感器并启动数据采集
this.initializeSensors();
// 启动UI刷新定时器
this.timerId = setInterval(() => {
this.refreshData();
}, 1000);
}
aboutToDisappear() {
if (this.timerId !== -1) {
clearInterval(this.timerId);
}
this.stopSensors();
}
build() {
Column() {
// 顶部:海拔信息(核心数据)
this.buildAltitudeCard()
// 中部:生命体征
Row() {
this.buildVitalCard('心率', this.heartRate.toString(), 'bpm', '#e53e3e')
this.buildVitalCard('血氧', this.spO2.toString(), '%', '#3182ce')
}
.width('100%')
.justifyContent(FlexAlign.SpaceEvenly)
.padding({ top: 10, bottom: 10 })
// 底部:环境数据
Row() {
this.buildEnvCard('温度', this.temperature.toString(), '°C')
this.buildEnvCard('紫外线', this.uvIndex.toString(), '')
this.buildEnvCard('垂直速度', this.verticalSpeed.toString(), 'm/h')
}
.width('100%')
.justifyContent(FlexAlign.SpaceEvenly)
}
.width('100%')
.height('100%')
.backgroundColor('#0d1b2a')
.padding(10)
}
@Builder
buildAltitudeCard() {
Column() {
Text('海拔')
.fontSize(12)
.fontColor('#a0aec0')
Text(this.currentAltitude.toFixed(0))
.fontSize(48)
.fontWeight(FontWeight.Bold)
.fontColor('#ffffff')
Text('米')
.fontSize(14)
.fontColor('#a0aec0')
}
.width('100%')
.padding(15)
.backgroundColor('#1a365d')
.borderRadius(16)
}
@Builder
buildVitalCard(label: string, value: string, unit: string, color: string) {
Column() {
Text(label)
.fontSize(10)
.fontColor('#a0aec0')
Text(value)
.fontSize(28)
.fontWeight(FontWeight.Medium)
.fontColor(color)
Text(unit)
.fontSize(10)
.fontColor('#718096')
}
.padding(10)
.backgroundColor('#1a365d')
.borderRadius(12)
}
@Builder
buildEnvCard(label: string, value: string, unit: string) {
Column() {
Text(label)
.fontSize(8)
.fontColor('#a0aec0')
Row() {
Text(value)
.fontSize(16)
.fontColor('#ffffff')
Text(unit)
.fontSize(10)
.fontColor('#718096')
}
}
.padding(8)
.backgroundColor('#1a365d')
.borderRadius(8)
}
}
六、数据处理流程
完整的数据处理链路如下图所示,从传感器原始采集到最终UI展示,每个环节都至关重要:
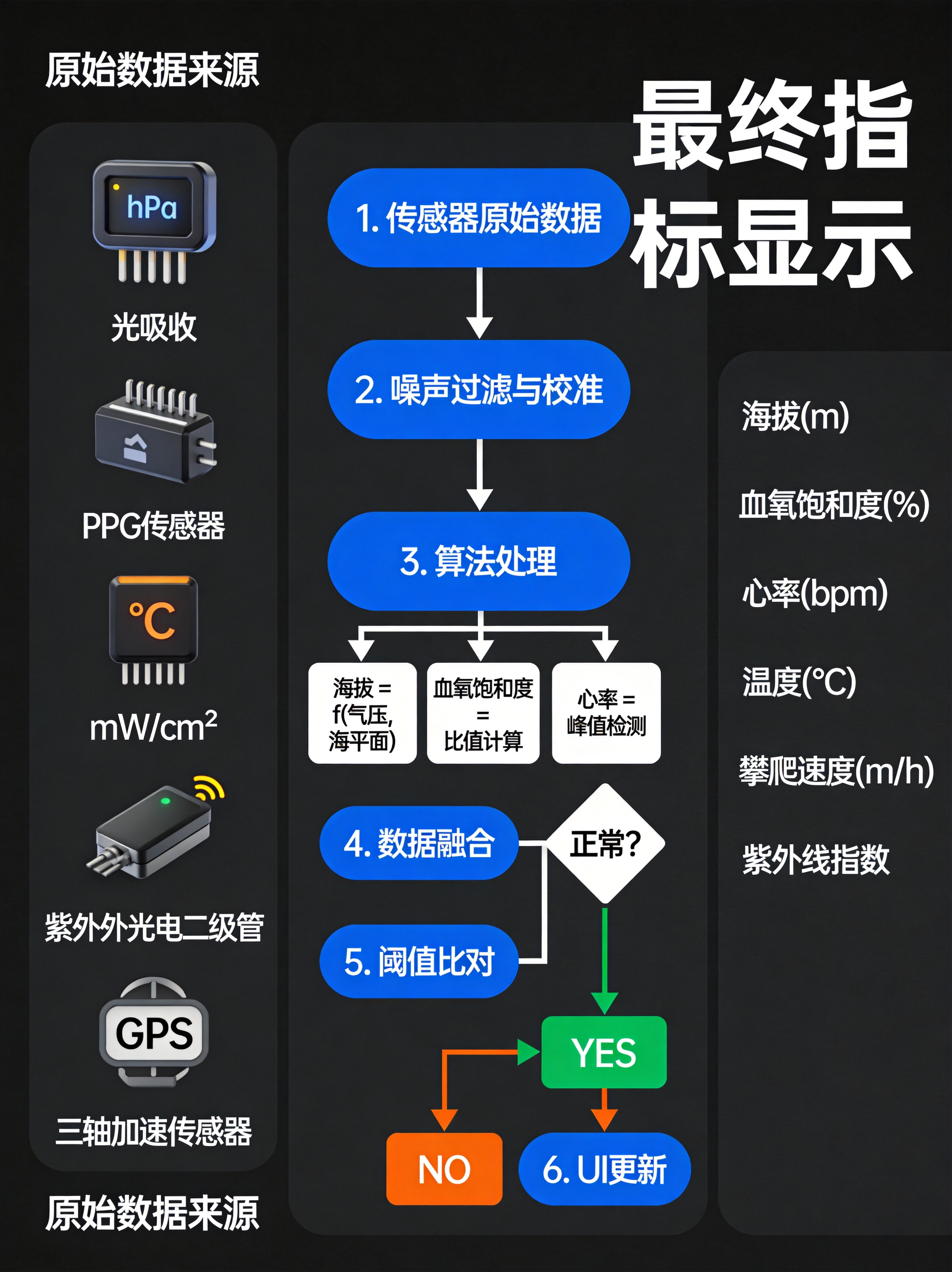
处理流程包含六个关键阶段:
- 原始数据采集:各传感器以固定频率采样原始物理信号
- 噪声过滤与校准:通过数字滤波去除高频噪声,校准零点偏移和温度漂移
- 算法处理:根据各指标特性执行专有算法(气压公式、PPG比值计算、心率峰值检测)
- 数据融合:综合多传感器信息进行状态判断,如结合心率和运动状态判断血氧数据的可信度
- 阈值比对:与预设安全阈值比较,触发相应告警
- UI更新:以符合手表刷新率的频率更新界面显示
七、功耗优化与异常处理
功耗优化策略
手表续航是关键体验指标,需从多个维度进行优化:
- 动态采样频率:静止时降低采样频率,运动时提高
- 分时唤醒:非关键指标采用低频轮询,关键指标实时监测
- 数据批量处理:减少中断次数,积攒数据后批量处理
- 屏幕亮度自适应:光照充足时降低背光
// 功耗管理器
class PowerManager {
private static readonly POWER_MODES = {
HIGH: { sampleInterval: 100, screenBrightness: 1.0, updateInterval: 1000 },
MEDIUM: { sampleInterval: 500, screenBrightness: 0.7, updateInterval: 2000 },
LOW: { sampleInterval: 2000, screenBrightness: 0.4, updateInterval: 5000 }
};
private currentMode: keyof typeof this.POWER_MODES = 'MEDIUM';
setPowerMode(mode: keyof typeof this.POWER_MODES): void {
this.currentMode = mode;
const config = this.POWER_MODES[mode];
// 应用配置到各模块
SensorManager.setInterval(config.sampleInterval);
DisplayManager.setBrightness(config.screenBrightness);
}
// 根据剩余电量自动调整
autoAdjust(batteryLevel: number): void {
if (batteryLevel > 50) {
this.setPowerMode('HIGH');
} else if (batteryLevel > 20) {
this.setPowerMode('MEDIUM');
} else {
this.setPowerMode('LOW');
}
}
}
异常处理机制
// 全局异常处理器
class ErrorHandler {
// 传感器异常映射表
private static readonly SENSOR_ERRORS = {
'SENSOR_NOT_AVAILABLE': '当前设备不支持该传感器',
'SENSOR_PERMISSION_DENIED': '请在设置中授予传感器权限',
'SENSOR_TIMEOUT': '传感器响应超时,请重启设备',
'DATA_OUT_OF_RANGE': '数据超出合理范围,已标记异常'
};
static handle(error: Error): void {
const message = this.SENSOR_ERRORS[error.message] || error.message;
console.error(`[SensorError] ${message}`);
// 异常告警提示
AlertDialog.show({
title: '传感器异常',
message: message,
confirm: { value: '确定', action: () => {} }
});
// 尝试恢复策略
this.attemptRecovery(error);
}
private static attemptRecovery(error: Error): void {
// 等待后重试传感器连接
setTimeout(() => {
SensorManager.reinitialize();
}, 2000);
}
}
八、总结与展望
本文详细介绍了基于鸿蒙6.0开发高山攀登智能手表监测功能的完整技术方案。通过HarmonyOS NEXT的HDF驱动框架,我们实现了气压、PPG、温度、UV等多类型传感器的统一调用;通过Barometric Formula和PPG信号处理算法,实现了海拔、血氧、心率等关键指标的精确计算;通过ArkUI声明式框架,打造了适合手表端的信息分层交互界面。
技术亮点总结:
- 统一传感器抽象:HDF框架屏蔽了硬件差异,提供一致的开发接口
- 专业算法实现:海拔计算采用国际标准大气模型,血氧算法基于PPG信号分析
- 低功耗设计:多级功耗模式自动切换,兼顾续航与数据精度
- 健壮性保障:完善的异常处理与恢复机制
鸿蒙生态的持续发展为可穿戴设备开发带来了更多可能性,期待与广大开发者共同探索智能穿戴在专业运动领域的深度应用。

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐


 0
0 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)