
现代智能汽车系统——车载操作系统0
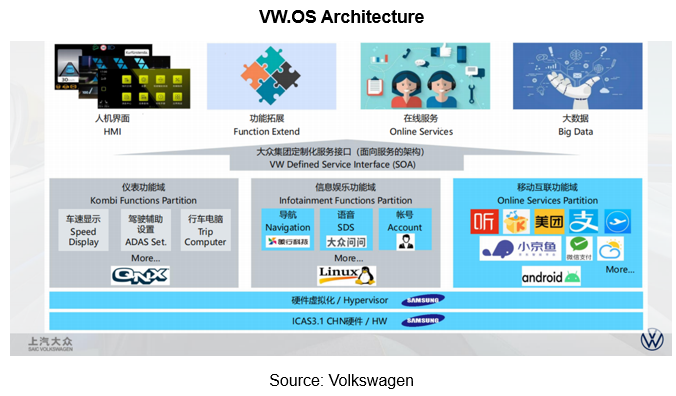
现代智能汽车操作系统采用异构混合架构,包含三类核心系统:QNX等安全实时系统(仪表/智驾)、Linux性能系统(智驾计算)和Android娱乐系统(座舱)。通过Hypervisor虚拟化技术实现多系统芯片级整合,配合AUTOSAR中间件实现软硬解耦。国产系统如鸿蒙、AliOS正在崛起。关键技术挑战包括混合关键性管理、快速启动和确定性调度等,形成"虚拟化底座+安全/娱乐双系统+中间件通信&
现代智能汽车操作系统采用异构混合架构,包含三类核心系统:QNX等安全实时系统(仪表/智驾)、Linux性能系统(智驾计算)和Android娱乐系统(座舱)。通过Hypervisor虚拟化技术实现多系统芯片级整合,配合AUTOSAR中间件实现软硬解耦。国产系统如鸿蒙、AliOS正在崛起。关键技术挑战包括混合关键性管理、快速启动和确定性调度等,形成"虚拟化底座+安全/娱乐双系统+中间件通信"的完整技术栈。
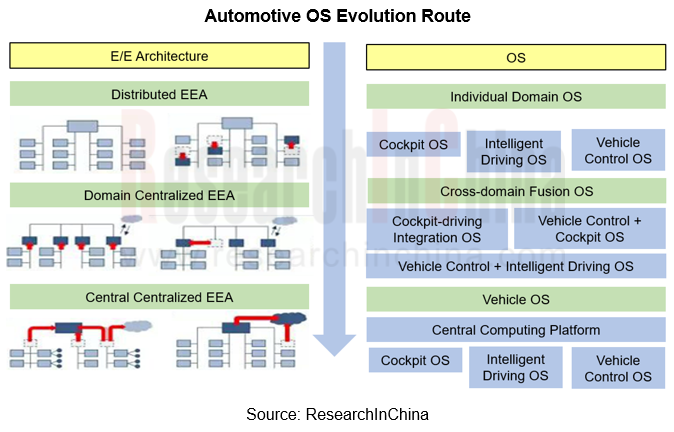
在现代智能汽车(SDV)架构中,车载操作系统(Automotive OS) 已经不再是一个单一的组件,而是一套复杂的、多层级的异构软件集合。
完善知识体系,需要将“车载操作系统”从**狭义(内核层)扩展到广义(系统层+中间件)**来理解。
以下是现代智能汽车操作系统的全景解析:
Ref:https://www.eet-china.com/mp/a151896.html
1. 宏观架构:异构并存 (The Heterogeneous Mix)
由于汽车不同域(座舱、智驾、底盘)对实时性(Real-time)、安全性(Safety)和算力(Performance)的要求截然不同,目前没有任何单一的 OS 能通吃所有场景。因此,现代汽车采用混合架构。
通常分为三类:
| OS 类型 | 典型代表 | 核心特性 | 应用场景 | 安全等级要求 |
|---|---|---|---|---|
| 安全实时操作系统 (RTOS) | QNX, VxWorks, Classic AUTOSAR (OSEK) | 极低延迟、确定性、高可靠、微内核 | 仪表盘、智驾控制、底盘控制、安全网关 | ASIL-D / ASIL-B |
| 性能型操作系统 (Performance OS) | Linux (AGL, Ubuntu), QNX | 高吞吐量、丰富的驱动生态、AI计算支持 | 智驾感知、服务型网关、中央计算单元 | ASIL-B / QM |
| 娱乐型操作系统 (Infotainment OS) | Android Automotive OS (AAOS), Linux | 丰富的应用生态、UI交互好、多媒体强 | 中控大屏、副驾娱乐屏 | QM (通常不涉及安全) |
2. 核心操作系统详解
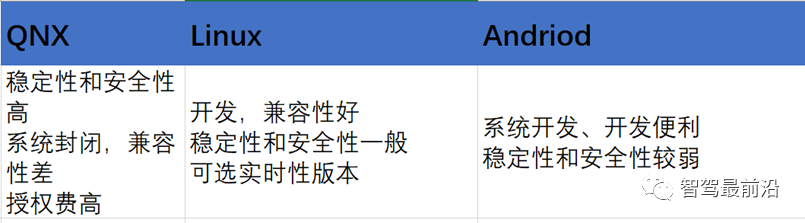
A. QNX (BlackBerry) —— 安全的基石
- 架构:微内核 (Microkernel)。内核只负责最基本的调度和IPC,驱动、协议栈都在用户空间运行。
- 地位:目前全球市占率最高的安全OS。
- 为什么用它?
- 永不蓝屏:驱动崩溃不会导致内核崩溃,服务可以重启。
- 通过认证:天生通过 ISO 26262 ASIL-D 认证。
- 用途:数字仪表(Cluster)、自动驾驶决策控制模块。
B. Linux —— 算力与开放的王者
- 架构:宏内核 (Monolithic Kernel)。
- 地位:智驾感知和底层基础软件的主流选择。
- 变种:
- AGL (Automotive Grade Linux):Linux基金会主导的行业标准版。
- Civil Infrastructure Platform (CIP):超长维护周期的Linux内核。
- 车企定制 Linux:如 Tesla OS(基于 Ubuntu)、NVIDIA Drive OS(基于 Yocto)。
- 痛点:标准 Linux 难以通过高等级功能安全认证(Safety Linux 是目前的研究热点)。
C. Android Automotive OS (AAOS) —— 座舱生态霸主
- 架构:基于 Linux 内核,但上层是 Google 的 Java 框架和服务(GAS)。
- 地位:IVI(车载信息娱乐系统)的绝对主流。
- 区别:不是手机映射(Android Auto),而是直接运行在车机硬件上的完整系统。
- 优势:直接复用手机 App 生态,开发成本低,交互体验好。
3. 中间件与标准:OS 之上的“OS”
在狭义 OS 内核之上,为了实现“软硬解耦”,必须有一层标准化的中间件,这通常也被归类到广义 OS 范畴。
A. AUTOSAR Classic Platform (CP)
- 运行环境:MCU (Microcontroller)。
- 本质:它更像是一个静态的 Library / Scheduler,而不是现代意义的 OS。
- 用途:控制车窗、车灯、发动机、制动等传统 ECU。
- 特点:高实时、低资源、静态配置(编译后不可改)。
B. AUTOSAR Adaptive Platform (AP)
- 运行环境:SoC (System on Chip),运行在 Linux 或 QNX 之上。
- 本质:基于 C++ 的中间件标准(ARA: AUTOSAR Runtime for Adaptive)。
- 用途:高性能计算单元(HPC)、自动驾驶域控。
- 特点:支持服务化架构(SOA)、支持动态部署(OTA)、POSIX 兼容。
4. 关键技术架构:Hypervisor (虚拟化)
既然一辆车里有 Android(娱乐)、QNX(仪表)和 Linux(智驾),为了降低成本(少用几颗芯片),我们使用 Cockpit SoC (如 8155/8295) 或 Drive SoC (如 Orin) 通过 Hypervisor 来运行多系统。
- Type-1 Hypervisor (裸金属):直接运行在硬件上。
- QNX Hypervisor:目前最主流商用方案。
- ACRN:Linux 基金会针对嵌入式推出的开源 Hypervisor。
- OpenSynergy COQOS。
- 典型架构:
- Hardware -> Hypervisor -> [VM1: QNX (仪表)] + [VM2: Android (中控)]。
- 难点:GPU 虚拟化(让两个系统共享一个 GPU)、音频共享、快速启动。
5. 中国力量与新兴 OS
在“缺芯少魂”的背景下,国产车载 OS 正在崛起:
- 华为鸿蒙 (HarmonyOS):
- 微内核设计,分布式架构。
- 鸿蒙座舱 (HMOS):对标 Android,但在多设备互联上有优势。
- AOS/VOS/SOS:华为智驾三大 OS 内核,覆盖不同实时性需求。
- AliOS (斑马智行):基于 Linux 深度定制,早期主打云服务融合。
- 普华基础软件 (i-Soft):主攻国产 AUTOSAR CP/AP 方案。
6. 车载 OS 面临的技术挑战 (考点)
如果你要深入架构设计,以下几点是核心痛点:
- 混合关键性 (Mixed Criticality):如何在同一个芯片上,既跑“愤怒的小鸟”(无安全要求),又跑“自动刹车报警”(ASIL-B/D),且保证前者死机绝对不影响后者?(依靠 Hypervisor 的空间隔离和时间调度隔离)。
- 快速启动 (Fast Boot):法规要求倒车影像必须在 2秒内 显示,而 Android 启动通常需要 20秒+。解决方案是使用“STR (Suspend to RAM)”或让底层 OS (QNX/Linux) 先接管显示,Android 后台慢慢加载(Early Boot Video)。
- 确定性调度:智驾算法要求每 33ms 必须处理完一帧图像,Linux 的普通调度策略往往无法满足,需要打 PREEMPT_RT 补丁或使用专用的调度器。
- 数据安全与隐私:OS 层面的 SELinux 策略、TrustZone (TEE) 的使用,防止车辆被远程控制。
总结
在你的知识库中,车载操作系统应该被描述为:
一个以 Hypervisor 为底座,QNX/Safety Linux 负责核心控制与安全,Android 负责交互体验,并通过 AUTOSAR AP/DDS 中间件实现服务化通信的异构软件平台。
- Hypervisor 是地基和物业管理(负责划分房间、隔离水电)。
- QNX/Safety Linux 和 Android 是住在楼里的两户不同性格的租客(一个严谨,一个娱乐)。
- 中间件 (AUTOSAR/DDS) 是楼里的管道系统和通用语言(让大家能互通有无)。
- SOA 是大楼的运行规则(按需服务)。
下面是它们之间详细的层级关系和交互逻辑:
1. 宏观层级图 (The Big Picture)
mermaid
graph TD
subgraph "应用层 (APP Layer)"
Cluster_App[仪表盘/智驾算法]
IVI_App[音乐/地图/爱奇艺]
end
subgraph "中间件层 (Middleware Layer)"
subgraph "OS 1: 实时安全域"
AP[AUTOSAR AP / DDS]
end
subgraph "OS 2: 娱乐域"
VHAL[Android Vehicle HAL / DDS Bridge]
end
end
subgraph "操作系统层 (OS Layer)"
QNX[Guest OS 1: QNX / Safety Linux]
Android[Guest OS 2: Android]
end
subgraph "虚拟化层 (Virtualization)"
Hyper[Hypervisor (QNX Hypervisor / ACRN)]
end
subgraph "硬件层 (Hardware)"
SoC[SoC Chip (CPU/GPU/ISP)]
end
%% Relationships
SoC --> Hyper
Hyper --> QNX
Hyper --> Android
QNX --> AP
Android --> VHAL
AP --> Cluster_App
VHAL --> IVI_App
%% Communication
AP <== "IPC / Shared Memory" ==> VHAL2. 详细关系解析
第一层关系:Hypervisor 与 OS (房东与租客)
关系:管理与被管理、隔离与共享。
- Hypervisor (底座):直接运行在硬件之上(Type-1)。它的核心任务是将一颗 SoC 芯片(如高通 8155)的 CPU、内存、GPU 等资源切分成几块。
- QNX/Safety Linux (安全租客):拿走一块资源(比如 2个 CPU 核心,4G 内存)。它负责运行仪表盘、HUD、自动驾驶决策。如果它崩溃了,车可能就失控了,所以需要高安全等级。
- Android (娱乐租客):拿走另一块资源。它负责运行中控大屏的娱乐应用。由于 Android 代码庞大且开源,容易死机,Hypervisor 确保 Android 死机绝对不会影响 QNX,保证仪表盘依然能显示车速和报警灯。
第二层关系:OS 与 中间件 (土壤与根系)
关系:依托与抽象。
- AUTOSAR Adaptive (AP) on QNX/Linux:
- QNX 只是提供了最基本的内核调度。为了开发智驾应用,程序员不想关心底层是 QNX 还是 Linux,也不想关心网络是 CAN 还是以太网。
- AUTOSAR AP 跑在 QNX 之上,提供了一套标准的 C++ 接口。智驾算法是基于 AUTOSAR AP 开发的,而不是直接基于 QNX 系统调用开发的。这实现了应用软件与操作系统的解耦。
- Android 与 中间件:
- Android 比较特殊,它自己就是一套完整的生态。它通常不直接跑标准 AUTOSAR。
- Android 通过 VHAL (Vehicle Hardware Abstraction Layer) 或特定的 Service 与底层的中间件网络通信。
第三层关系:中间件内部 (DDS, SOA, AUTOSAR)
这是最容易混淆的部分,它们是相辅相成的。
-
SOA (面向服务的架构):
- 这是“设计思想���。它规定了软件模块之间不要“硬连线”,而是“发布/订阅”。
- 例子:雷达模块说“我有障碍物数据(发布服务)”,谁关心谁就来订阅,我不管你是刹车还是报警。
-
AUTOSAR Adaptive (AP):
- 这是“实现框架”。它规定了如何写代码来实现 SOA。它定义了怎么管理进程、怎么做诊断、怎么更新。
-
DDS (数据分发服务):
- 这是“快递员/通信协议”。AUTOSAR AP 决定了要发消息,而 DDS 负责真正把消息发出去。
- 核心能力:DDS 极其强大,它可以在不同 OS 之间(穿过 Hypervisor)、不同芯片之间(通过以太网)透明地传输数据。
- 场景:QNX 里的智驾算法算出了一条路径,通过 DDS 发布;Android 里的导航地图订阅了这个 DDS 话题,于是在屏幕上画出了路径。
3. 举例说明:一个“显示车速”的流程
为了串联所有概念,我们看下车速信号是如何从车轮传到中控屏(Android)和仪表盘(QNX)的:
- 底盘 (Sensors):轮速传感器通过 CAN 总线发送车速数据。
- 网关 -> SoC:数据进入智驾/座舱芯片。
- QNX (Safety Domain):
- 数据首先被 QNX 里的 AUTOSAR AP 模块接收。
- 仪表盘 App (运行在 QNX 上) 通过内部通信直接读取该数据,在仪表屏上绘制出“100km/h”的指针。
- 跨域通信 (Hypervisor/DDS):
- 现在 Android (中控屏) 也想显示车速。
- QNX 里的通信模块(基于 DDS)将车速数据打包。
- 利用 Hypervisor 提供的 共享内存 (Shared Memory) 或 虚拟网络 通道,数据瞬间“穿墙”传到了 Android 所在的内存区域。
- Android (Infotainment Domain):
- Android 里的 DDS 客户端 或 VHAL 收到数据。
- Android 系统将其层层上报,最终 APP(如高德地图)拿到数据,在导航界面显示“当前车速 100km/h”。
总结:一句话概括
- Hypervisor 劈开了硬件,让QNX(保命)和Android(娱乐)在一颗芯片上做邻居;
- AUTOSAR 帮 QNX 里的程序屏蔽了底层的复杂性;
- SOA 是大家沟通的原则(服务化);
- DDS 是穿梭在 QNX 和 Android 之间的快递员,负责在复杂的系统里高效搬运数据。

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐

 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)