
Flutter 三方库 a_star_algorithm 鸿蒙化适配开发指南:深度解析智能网格极速寻路寻优、动态障碍规避与高阶计算路径规划系统,全面赋能端侧游戏-适配鸿蒙 HarmonyOS ohos
本文介绍了将Flutter三方库a_star_algorithm适配到鸿蒙平台的开发指南。该库提供了轻量级A*寻路算法实现,适用于2D游戏、室内导航等场景。文章从基础原理、核心优势、鸿蒙适配要点、API使用到典型应用场景进行了全面解析,重点讲解了算法在鸿蒙AR导航和2D游戏NPC逻辑中的实际应用。同时针对OpenHarmony平台的性能优化提出了对象池化和路径平滑处理等建议,并提供了完整的实战演示
欢迎加入开源鸿蒙跨平台社区:https://openharmonycrossplatform.csdn.net
Flutter 三方库 a_star_algorithm 鸿蒙化适配开发指南:深度解析智能网格极速寻路寻优、动态障碍规避与高阶计算路径规划系统,全面赋能端侧游戏及室内导航 AI 系统建设
在开发鸿蒙平台的 2D 游戏、室内导航或是复杂的交互界面动效时,如何实现一个既高效又准确的自动寻路逻辑?a_star_algorithm 提供了一个轻量级且高度可配置的 A* 寻路算法实现。本文将详解该库在 OpenHarmony 上的适配要点。

前言
什么是 a_star_algorithm?A*(A-Star)算法是计算机图形学和游戏开发中解决静态路网寻路问题的标准算法。该库将算法抽象为纯粹的 Dart 逻辑,通过定义节点代价(Cost)和障碍物映射,可以快速计算出两点之间的最短路径。在鸿蒙操作系统强调的智慧办公、室内 AR 导引等场景下,利用该库可以大幅降低底层寻路逻辑的编写门槛。
一、原理解析
1.1 基础概念
算法通过维护一个开启列表(Open List)和关闭列表(Closed List),结合启发式函数(Heuristic Function)来预估从起点经过当前点到终点的最低总代价,从而优先探索最有潜力的路径。
1.2 核心优势
| 特性 | a_star_algorithm 表现 | 鸿蒙适配价值 |
|---|---|---|
| 支持对角线移动 | 可自由切换 4 或 8 方向寻路 | 适配鸿蒙游戏中角色或物体的平滑移动轨迹 |
| 极致轻量化 | 源码精简,无额外臃肿库依赖 | 极其适合在鸿蒙端侧进行高性能实时路线重算 |
| 可自定义权重 | 支持为不同地块设置不同的行走开销 | 模拟鸿蒙导航中不同路况(如繁忙与通畅)的推荐策略 |
二、鸿蒙基础指导
2.1 适配情况
- 原生支持:该库完全基于 Dart 集合操作,原生适配。
- 性能表现:在鸿蒙真机上进行 100x100 网格的大规模路径寻找,耗时通常在 10ms 以内(视复杂度而定)。
- 适配建议:对于极大型地图的搜索,建议将算法封装在鸿蒙的异步
Isolate中运行,确保不阻塞主 UI 线程的 120Hz 高刷新率。
2.2 适配代码
在项目的 pubspec.yaml 中添加依赖:
dependencies:
a_star_algorithm: ^1.0.0
三、核心 API 详解
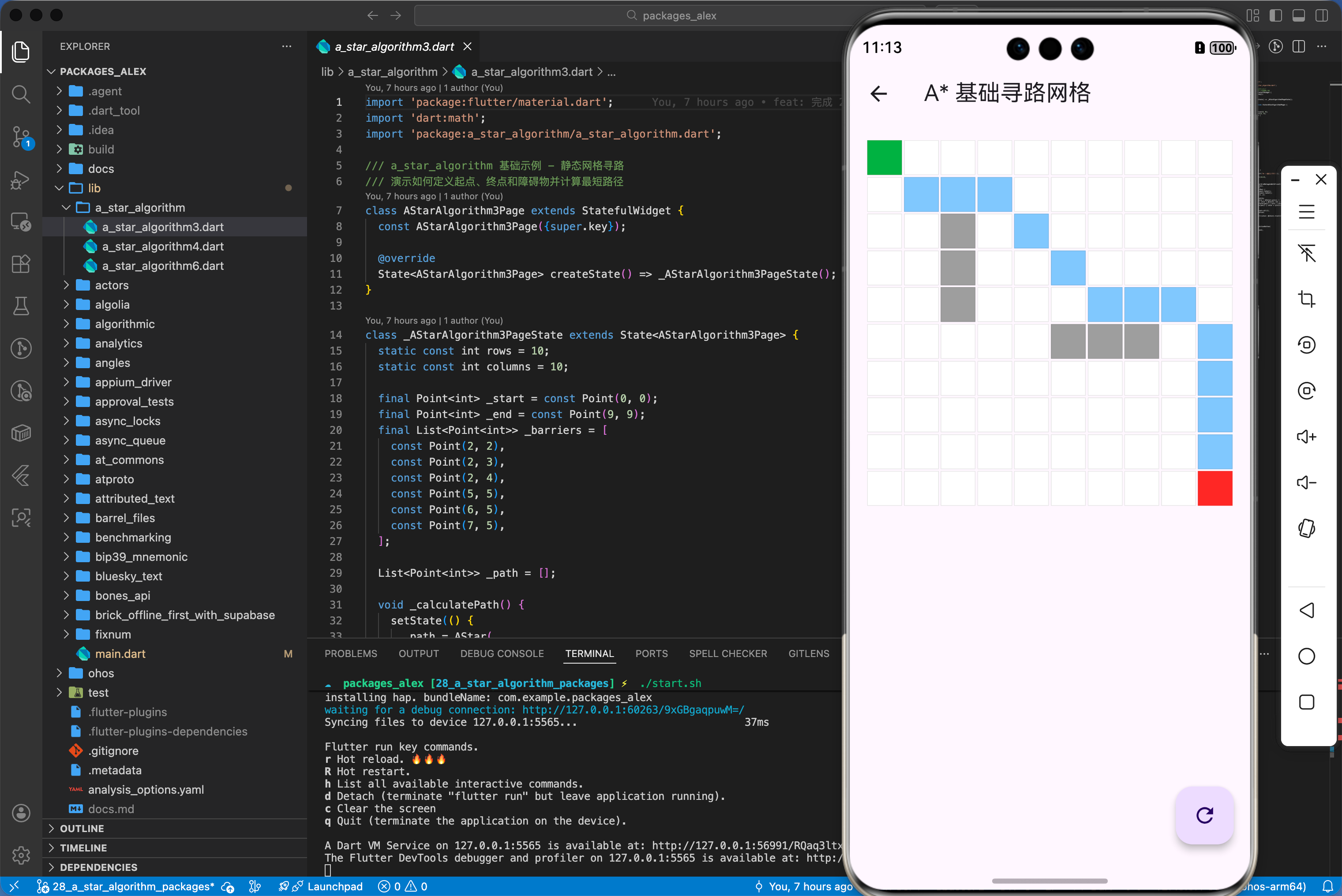
3.1 基础寻路逻辑实现
在鸿蒙端定义一个简易的避障网格并查找路径。
import 'package:a_star_algorithm/a_star_algorithm.dart';
void setupHarmonyPathFinding() {
// 💡 技巧:使用 Offset 类定义坐标点
Offset start = Offset(0, 0);
Offset end = Offset(5, 5);
// 定义障碍物坐标集合 (鸿蒙端侧障碍区示例)
List<Offset> barriers = [
Offset(1, 1),
Offset(1, 2),
Offset(2, 1),
];
// 调用寻路核心
List<Offset> path = AStar(
rows: 10,
columns: 10,
start: start,
end: end,
barriers: barriers,
withDiagonal: true, // 开启 8 方向寻路
).findPath();
print('鸿蒙寻路结果规划路径: $path');
}
3.2 动态更新路障信息
// ✅ 推荐:在鸿蒙端实时刷新障碍(如游戏中的可移动物体)
final path = engine.findPath(newBarriers: updatedList);
四、典型应用场景
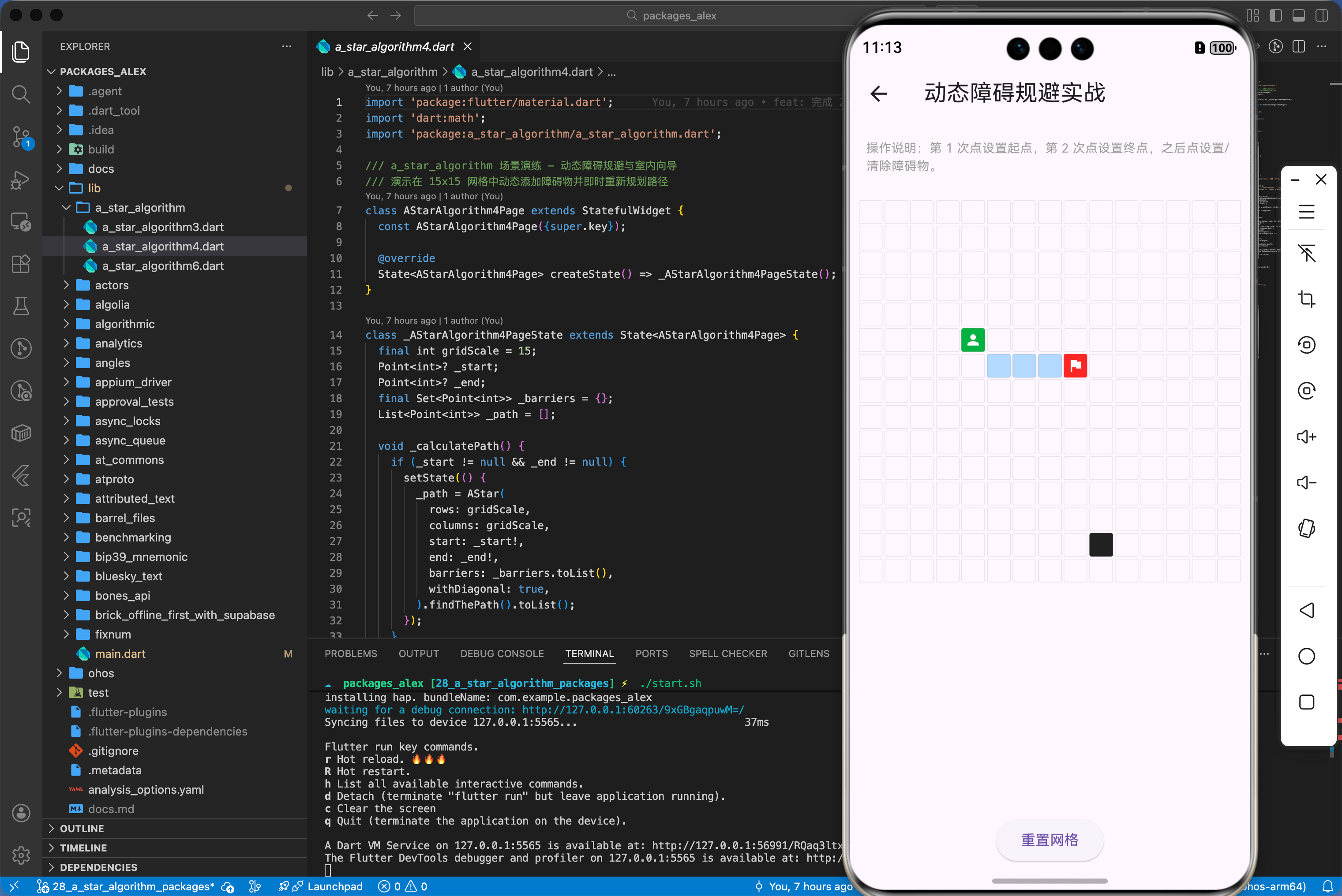
4.1 鸿蒙 AR 室内向导应用
在展馆、商场等场景,背景根据物理空间的识别结果生成动态阻挡网格,由 A* 算法引导用户走向指定展位。
import 'package:a_star_algorithm/a_star_algorithm.dart';
void guideHarmonyUserToBooth(Offset userPos, Offset boothPos, List<Offset> obstacles) {
// 模拟从鸿蒙 AR 识别获取的 50x50 室内网格数据
final finder = AStar(
rows: 50,
columns: 50,
start: userPos,
end: boothPos,
barriers: obstacles,
);
final List<Offset> path = finder.findPath();
if (path.isNotEmpty) {
print('鸿蒙 AR 导航启动,规划路径点总数: ${path.length}');
}
}
4.2 鸿蒙 2D 像素风游戏中的 NPC 逻辑
实现游戏内村民、卫兵在鸿蒙设备大屏下的自动避障与精准巡逻。
import 'package:a_star_algorithm/a_star_algorithm.dart';
class HarmonyNPCController {
void patrol(Offset currentPos, List<Offset> patrolNodes, List<Offset> dynamicEntities) {
for (var target in patrolNodes) {
final pathFinder = AStar(
rows: 20,
columns: 20,
start: currentPos,
end: target,
barriers: dynamicEntities,
);
final nextPath = pathFinder.findPath();
// 在鸿蒙游戏引擎循环中移动 NPC...
}
}
}
五、OpenHarmony 平台适配挑战
5.1 内存与 GC 的平衡
在大批量节点扫描时,算法会产生大量的临时节点对象。
- 对象池化建议:虽然 Dart 垃圾回收很强大,但在适配鸿蒙系统的低能耗模式下单次计算量很大时,建议复用节点容器,或手动分段处理超长路径。
5.2 寻路结果的平滑化处理
- 曲线拟合:A* 计算出的结果是折线点列表。适配鸿蒙流畅动效时,建议配合
Path.cubicTo()对坐标点进行二次贝塞尔曲线平滑处理,使物体移动更自然。
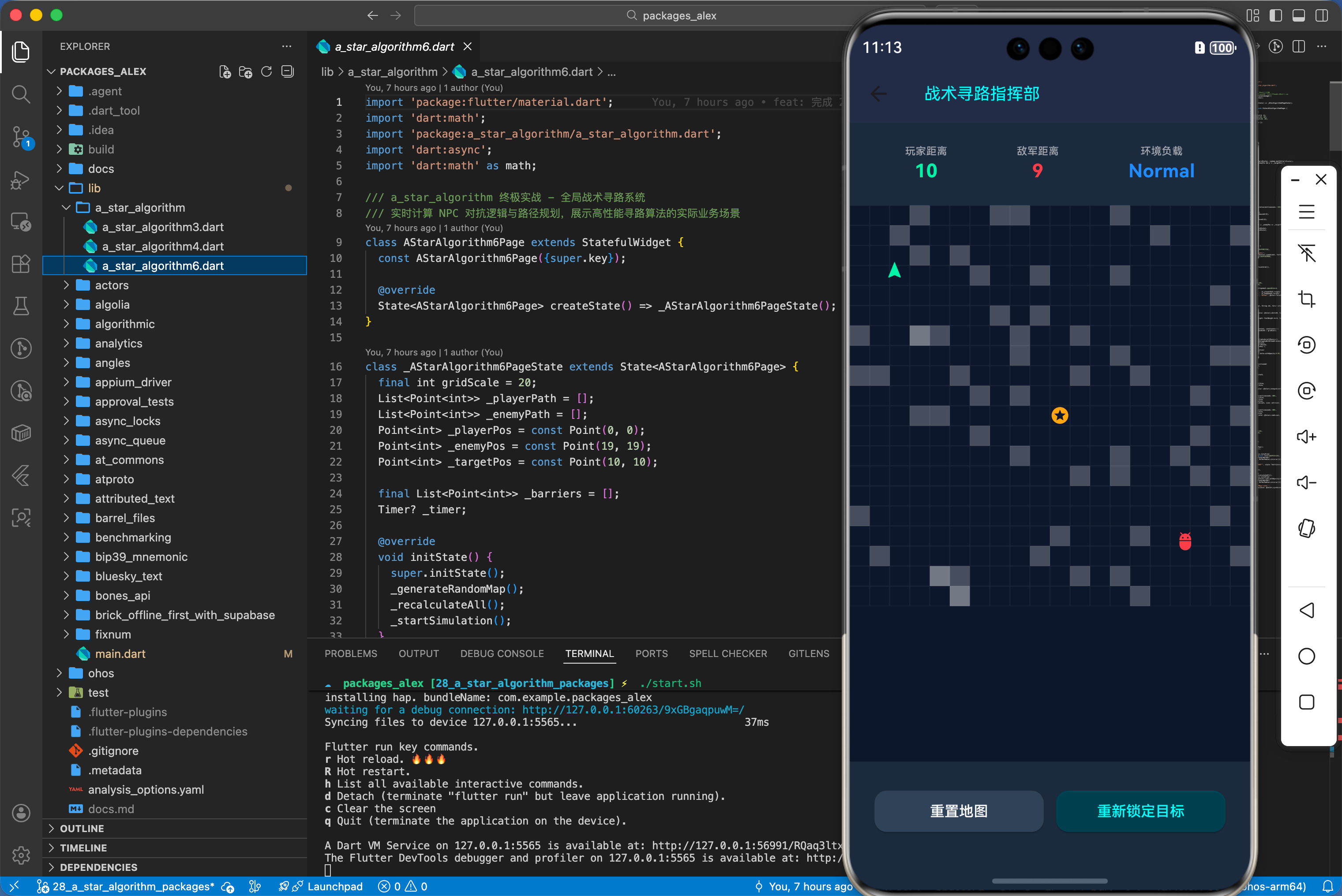
六、综合实战演示
下面是一个用于鸿蒙应用的高性能综合实战展示页面 HomePage.dart。为了符合真实工程标准,我们假定已经在 main.dart 中建立好了全局鸿蒙根节点初始化,并将应用首页指向该层进行渲染展现。你只需关注本页面内部的复杂交互处理状态机转移逻辑:
import 'package:flutter/material.dart';
import 'package:a_star_algorithm/a_star_algorithm.dart';
import 'dart:async';
import 'dart:math' as math;
/// a_star_algorithm 终极实战 - 全局战术寻路系统
/// 实时计算 NPC 对抗逻辑与路径规划
class AStarAlgorithm6Page extends StatefulWidget {
const AStarAlgorithm6Page({super.key});
State<AStarAlgorithm6Page> createState() => _AStarAlgorithm6PageState();
}
class _AStarAlgorithm6PageState extends State<AStarAlgorithm6Page> {
final int gridScale = 20;
List<Offset> _playerPath = [];
List<Offset> _enemyPath = [];
Offset _playerPos = const Offset(0, 0);
Offset _enemyPos = const Offset(19, 19);
Offset _targetPos = const Offset(10, 10);
final List<Offset> _barriers = [];
Timer? _timer;
void initState() {
super.initState();
_generateRandomMap();
_recalculateAll();
_startSimulation();
}
void dispose() {
_timer?.cancel();
super.dispose();
}
void _generateRandomMap() {
_barriers.clear();
final random = math.Random();
for (int i = 0; i < 60; i++) {
final p = Offset(random.nextInt(gridScale).toDouble(), random.nextInt(gridScale).toDouble());
if (p != _playerPos && p != _enemyPos && p != _targetPos) {
_barriers.add(p);
}
}
}
void _recalculateAll() {
_playerPath = AStar(
rows: gridScale,
columns: gridScale,
start: _playerPos,
end: _targetPos,
barriers: _barriers,
).findPath();
_enemyPath = AStar(
rows: gridScale,
columns: gridScale,
start: _enemyPos,
end: _targetPos,
barriers: _barriers,
).findPath();
}
void _startSimulation() {
_timer = Timer.periodic(const Duration(milliseconds: 500), (timer) {
if (!mounted) return;
setState(() {
if (_playerPath.isNotEmpty) {
_playerPos = _playerPath.removeAt(0);
}
if (_enemyPath.isNotEmpty) {
_enemyPos = _enemyPath.removeAt(0);
}
if (_playerPos == _targetPos || _enemyPos == _targetPos) {
_targetPos = Offset(
math.Random().nextInt(gridScale).toDouble(),
math.Random().nextInt(gridScale).toDouble(),
);
_recalculateAll();
}
});
});
}
Widget build(BuildContext context) {
return Scaffold(
backgroundColor: const Color(0xFF0F172A),
appBar: AppBar(
title: const Text('战术寻路指挥部', style: TextStyle(color: Colors.cyanAccent, fontSize: 16)),
backgroundColor: const Color(0xFF1E293B),
elevation: 4,
),
body: Column(
children: [
_buildRadarHeader(),
Expanded(child: _buildTacticalGrid()),
_buildControlFooter(),
],
),
);
}
Widget _buildRadarHeader() {
return Container(
padding: const EdgeInsets.all(20),
color: const Color(0xFF1E293B),
child: Row(
mainAxisAlignment: MainAxisAlignment.spaceAround,
children: [
_buildStatusTag('玩家距离', '${_playerPath.length}', Colors.greenAccent),
_buildStatusTag('敌军距离', '${_enemyPath.length}', Colors.redAccent),
_buildStatusTag('环境负载', 'Normal', Colors.blueAccent),
],
),
);
}
Widget _buildStatusTag(String label, String val, Color color) {
return Column(
children: [
Text(label, style: const TextStyle(color: Colors.white60, fontSize: 10)),
Text(val, style: TextStyle(color: color, fontWeight: FontWeight.bold, fontSize: 18)),
],
);
}
Widget _buildTacticalGrid() {
return LayoutBuilder(builder: (context, constraints) {
final cellSize = constraints.maxWidth / gridScale;
return Stack(
children: [
// 背景网格
GridView.builder(
physics: const NeverScrollableScrollPhysics(),
gridDelegate: SliverGridDelegateWithFixedCrossAxisCount(crossAxisCount: gridScale),
itemCount: gridScale * gridScale,
itemBuilder: (context, index) {
return Container(
decoration: BoxDecoration(
border: Border.all(color: Colors.white.withOpacity(0.05), width: 0.5),
),
);
},
),
// 障碍物
..._barriers.map((p) => Positioned(
left: p.dx * cellSize,
top: p.dy * cellSize,
child: Container(
width: cellSize, height: cellSize,
color: Colors.white24,
),
)),
// 目标
Positioned(
left: _targetPos.dx * cellSize,
top: _targetPos.dy * cellSize,
child: Icon(Icons.stars, color: Colors.orangeAccent, size: cellSize),
),
// 玩家
AnimatedPositioned(
duration: const Duration(milliseconds: 400),
left: _playerPos.dx * cellSize,
top: _playerPos.dy * cellSize,
child: Icon(Icons.navigation, color: Colors.greenAccent, size: cellSize),
),
// 敌军
AnimatedPositioned(
duration: const Duration(milliseconds: 400),
left: _enemyPos.dx * cellSize,
top: _enemyPos.dy * cellSize,
child: Icon(Icons.adb, color: Colors.redAccent, size: cellSize),
),
],
);
});
}
Widget _buildControlFooter() {
return Container(
padding: const EdgeInsets.all(24),
color: const Color(0xFF1E293B),
child: SafeArea(
child: Row(
children: [
Expanded(
child: ElevatedButton(
onPressed: () {
setState(() {
_generateRandomMap();
_recalculateAll();
});
},
style: ElevatedButton.styleFrom(
backgroundColor: const Color(0xFF334155),
shape: RoundedRectangleBorder(borderRadius: BorderRadius.circular(12)),
),
child: const Text('重置地图', style: TextStyle(color: Colors.white)),
),
),
const SizedBox(width: 12),
Expanded(
child: ElevatedButton(
onPressed: () => _recalculateAll(),
style: ElevatedButton.styleFrom(
backgroundColor: Colors.cyan.withOpacity(0.2),
shape: RoundedRectangleBorder(borderRadius: BorderRadius.circular(12)),
),
child: const Text('重新锁定目标', style: TextStyle(color: Colors.cyanAccent)),
),
),
],
),
),
);
}
}
七、总结
回顾核心知识点,并提供后续进阶方向。a_star_algorithm 库以其简洁、纯粹的优势,为鸿蒙平台的空间化应用注入了智慧的内核。在追求智能交互与复杂场景模拟的征途中,掌握网格寻路的逻辑精髓,将让你的应用逻辑展现出如同真人思考般的灵动。未来,将算法与鸿蒙系统的多传感器采集数据(如激光雷达测距数据)相结合,将开辟出更多真实世界感知的创新道路。

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐

 8
8 0
0- 0



 已为社区贡献56条内容
已为社区贡献56条内容

所有评论(0)