
鸿蒙OS赋能智能座舱:多模态交互新体验
本文基于HarmonyOS设计实现了一款智能座舱系统,采用"南向设备层-云端服务层-北向应用层"三层架构,通过MQTT协议实现全链路数据协同。系统以Hi3861开发板为核心构建数据采集终端,集成温湿度传感器、GPS模块等硬件,支持多模态交互和端云协同。测试表明,系统在数据采集精度(温度±0.3℃)、响应延迟(≤300ms)和低功耗(休眠电流≤10mA)等方面表现优异,相比传统座
随着汽车智能化与网联化的深度融合,智能座舱已从传统影音娱乐终端升级为 “环境感知 - 智能决策 - 人车交互” 的核心载体。当前主流座舱系统多依赖 Linux 或 Android 架构,存在设备协同低效、交互方式单一、数据同步滞后、生态封闭等痛点,难以满足驾驶场景下的安全与便捷需求。鸿蒙操作系统(HarmonyOS)凭借微内核架构、分布式软总线、原生跨设备协同等特性,为车载场景提供了全新技术解决方案。本文基于 HarmonyOS 设计实现了一款支持多模态交互、端云协同的智能座舱系统,通过 Hi3861 开发板与华为云 IoT 平台构建全链路通信,集成 AI 交互、状态监测、娱乐服务等核心功能,为车载智能化研发提供可复用的工程实践方案。
一、系统总体设计
1.1 设计目标
本系统以 “安全、智能、高效、可扩展” 为核心目标,具体实现:
- 实现车辆灯光、电机、环境监测等硬件的实时控制与状态反馈;
- 支持触控 + AI 文字双模态交互,降低驾驶分心风险;
- 基于端云协同架构,实现南向硬件与北向大屏的无缝数据同步;
- 保障车载环境下的通信稳定性与数据安全性,适配低功耗需求;
- 采用标准化接口与分层架构,支持后续硬件扩展与功能迭代。
1.2 总体架构
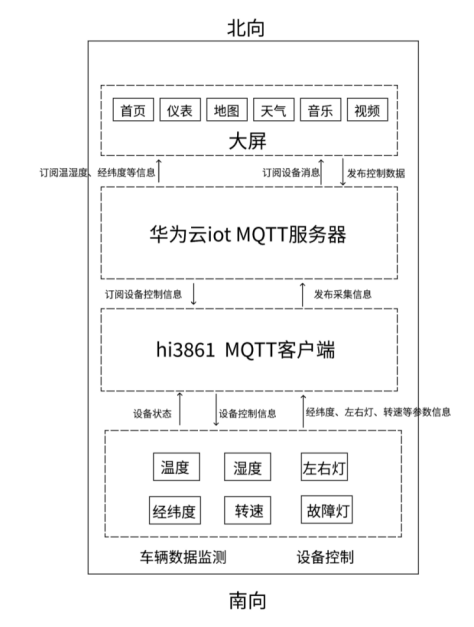
系统采用 “南向设备层 - 云端服务层 - 北向应用层” 三层架构,通过 MQTT 协议构建双向通信通道,实现全链路数据协同:
| 架构层级 | 核心功能 | 关键组件 / 技术 |
|---|---|---|
| 南向设备层 | 数据采集与硬件控制 | 普中 Hi3861 开发板、温湿度传感器(DS18B20)、GPS 模块(SIM808)、DC12V 电机、RGB 灯组、GPIO/UART/PWM 接口 |
| 云端服务层 | 数据枢纽与协议转发 | 华为云 IoT 平台、MQTT 3.1.1 协议、TLS 加密、数据持久化存储、规则引擎 |
| 北向应用层 | 智能交互与可视化展示 | DevEco Studio、ArkTS 语言、车载大屏、DeepSeek AI 助手、百度地图 API、高德天气 API |
1.3 技术特点及对比分析
与传统座舱系统相比,本系统的核心优势如下:
| 对比维度 | 传统座舱系统(Linux/Android) | 本系统(HarmonyOS) |
|---|---|---|
| 架构基础 | 宏内核 / 移动终端移植架构 | 微内核 + 分布式软总线 |
| 设备协同 | 设备孤岛,需额外中间件 | 原生跨设备协同,南北向解耦 |
| 交互方式 | 以触控 / 物理按键为主,操作复杂 | 触控 + AI 文字双模态,免手动操作 |
| 功耗控制 | 持续运行功耗高 | 休眠 - 唤醒节能模式,省电 70% 以上 |
| 扩展性 | 硬件接入需定制化开发 | 标准化数据格式,支持设备即插即用 |
| 数据同步 | 界面与设备状态易不同步 | 指令 - 状态 - 界面闭环,实时同步 |
核心技术亮点:
- 分层解耦架构:通过云端 MQTT 服务器实现南北向设备解耦,降低扩展成本;
- 低功耗设计:Hi3861 开发板支持休眠唤醒模式,适配车载续航需求;
- 多维度可视化:采用仪表盘、动态图标、颜色预警,提升信息获取效率;
- 端云安全通信:基于 TLS 1.2 双向认证与 HMAC-SHA256 加密,保障数据传输安全。
二、系统南向设计
2.1 南向技术方案
南向硬件以普中 Hi3861 开发板为核心,构建数据采集与设备控制终端,具体配置如下:
- 核心硬件:Hi3861 开发板(32 位 RISCV 内核,主频 160MHz)、DS18B20 温湿度传感器、SIM808 北斗 / GPS 双模定位模块、DC12V 有刷直流电机、RGB 转向灯组、故障蜂鸣器;
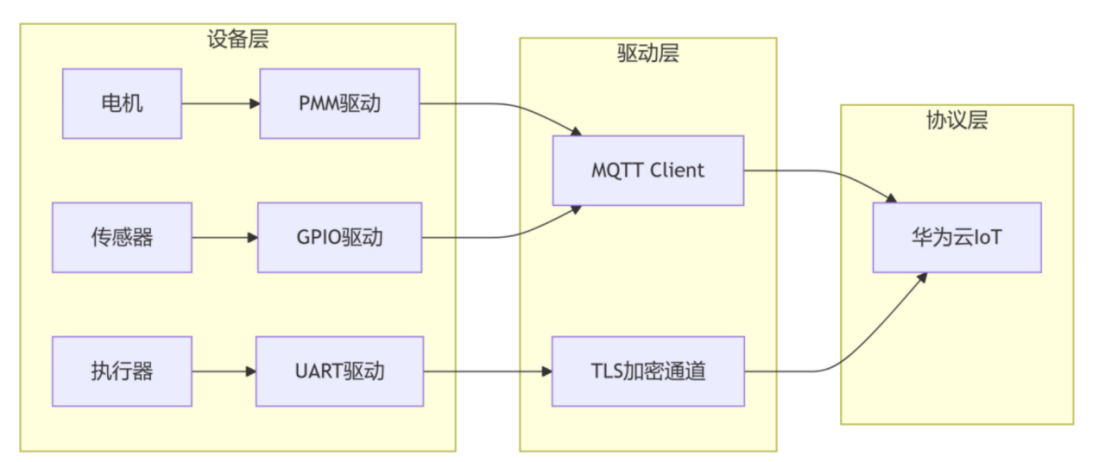
- 接口技术:GPIO 接口连接灯光与蜂鸣器,UART2 接口对接 GPS 模块,PWM 接口通过 L298N 驱动控制电机,I2C 接口连接温湿度传感器;
- 供电保障:DC-DC12V 转换电路,输出 5V/3.3V 稳定电压,效率≥92%,所有模块共地连接;
- 驱动框架:基于 HarmonyOS 驱动框架,采用多线程设计,通过消息队列实现任务间通信。
2.2 南向技术实现
设备控制模块
- 电机驱动:通过 L298N 双 H 桥驱动芯片,支持 0-5000RPM 转速调节,设计 TVS 管浪涌抑制、逻辑隔离、电流采样三级保护;
- 传感器驱动:温湿度传感器采用单总线协议,温度测量精度 ±0.3℃,湿度 ±2% RH,集成数据过滤算法丢弃异常值;GPS 模块解析 NMEA 协议 $GPRMC 语句,提取经纬度数据,定位成功率≥98%;
- 灯光驱动:RGB 灯组支持 1Hz±0.2 频率闪烁,实现左右转向灯与双闪功能,状态切换响应延迟≤100ms。
Hi3861 MQTT 客户端实现
基于 TCP/IP 协议栈构建 MQTT 通信链路,支持断线自动重连与消息缓存重传,核心代码片段:
c
运行
// MQTT客户端初始化
void mqtt_client_init() {
// 配置连接参数
mqtt_client_config_t config = {
.broker_ip = "iot-mqtts.cn-north-4.myhuaweicloud.com",
.broker_port = 8883,
.client_id = "hi3861_cockpit",
.username = "device_user",
.password = generate_hmac_sha256_password(DEVICE_SECRET, TIMESTAMP),
.tls_enable = true
};
// 创建MQTT客户端
mqtt_client_create(&config);
// 订阅控制指令主题
mqtt_client_subscribe("device/control", QOS1);
// 注册消息回调函数
mqtt_client_set_message_callback(message_handle);
// 启动自动重连机制
mqtt_client_start_reconnect(RECONNECT_INTERVAL);
}
// 数据上报函数
void report_device_data(device_data_t *data) {
cJSON *root = cJSON_CreateObject();
cJSON_AddNumberToObject(root, "temperature", data->temperature);
cJSON_AddNumberToObject(root, "humidity", data->humidity);
cJSON_AddStringToObject(root, "led_state", data->led_state);
cJSON_AddNumberToObject(root, "motor_level", data->motor_level);
cJSON_AddNumberToObject(root, "latitude", data->latitude);
cJSON_AddNumberToObject(root, "longitude", data->longitude);
char *payload = cJSON_PrintUnformatted(root);
mqtt_client_publish("device/status", payload, QOS1);
cJSON_Delete(root);
free(payload);
}
低功耗控制实现
通过 RTC 定时器实现休眠 - 唤醒调度,无数据变化时进入低功耗模式(电流≤10mA),每 5 秒唤醒采集一次数据,核心逻辑:
c
运行
void low_power_manage() {
if (data_no_change_timeout >= 5000) { // 5秒无数据变化
enter_sleep_mode(); // 进入低功耗休眠
}
rtc_timer_register(5000, wakeup_callback); // 5秒后唤醒
}
void wakeup_callback() {
exit_sleep_mode(); // 退出休眠
collect_sensor_data(); // 采集传感器数据
report_device_data(&g_device_data); // 上报数据
data_no_change_timeout = 0;
}
三、系统北向设计
3.1 北向技术开发
北向技术架构分为通信服务层与终端应用层,采用模块化设计适配车载大屏:
- 通信服务层:基于 MQTT 3.1.1 协议,实现设备注册、消息订阅 / 发布、自动重连、数据解析功能,对接华为云 IoT API 与第三方服务 API;
- 终端应用层:基于 ArkTS 与 ArkUI 框架,采用多 Tab 布局,适配 12.3 英寸车载大屏(1920×720 分辨率),实现 “一页一功能” 的简洁交互。
3.2 北向技术实现
五大核心功能页面
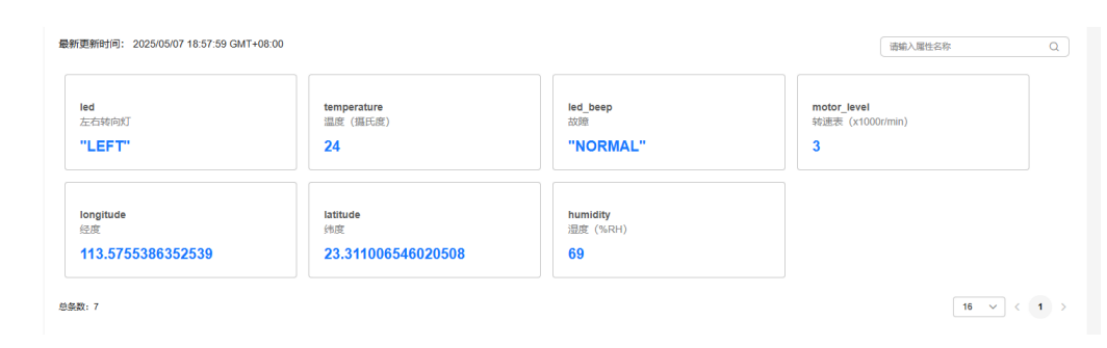
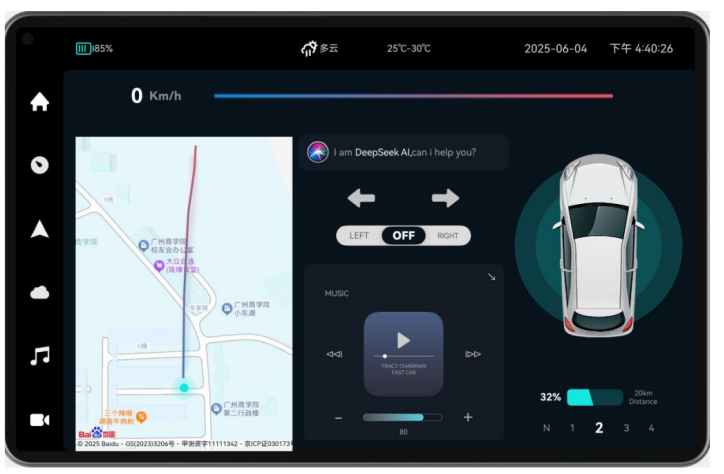
- 车辆数据监测页:通过仪表盘动态展示车速、转速,图表展示温湿度变化,灯光 / 故障状态以图标直观呈现,车速 > 120km/h 时红色高亮预警;
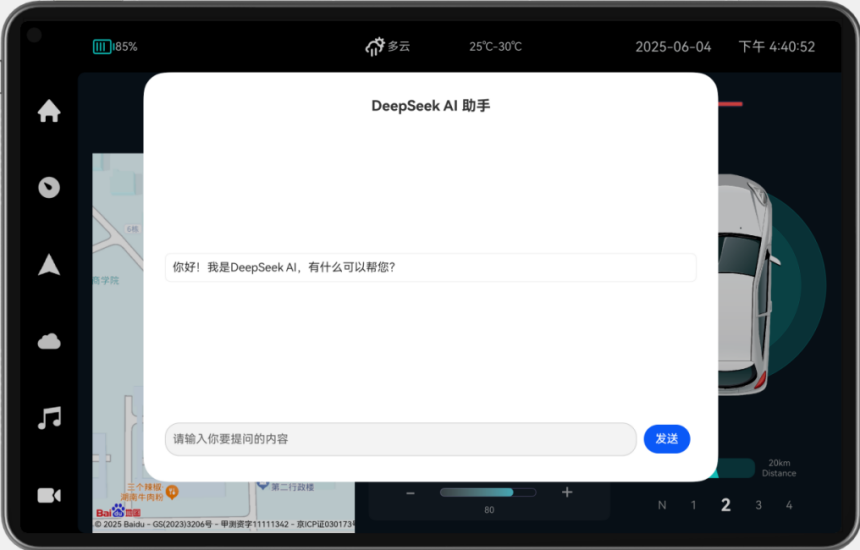
- AI 交互页:集成 DeepSeek AI 助手,支持文字输入指令(如 “打开左转向灯”“查询天气”),通过异步请求 API 实现实时响应,加载时显示 “正在思考中...” 动画;
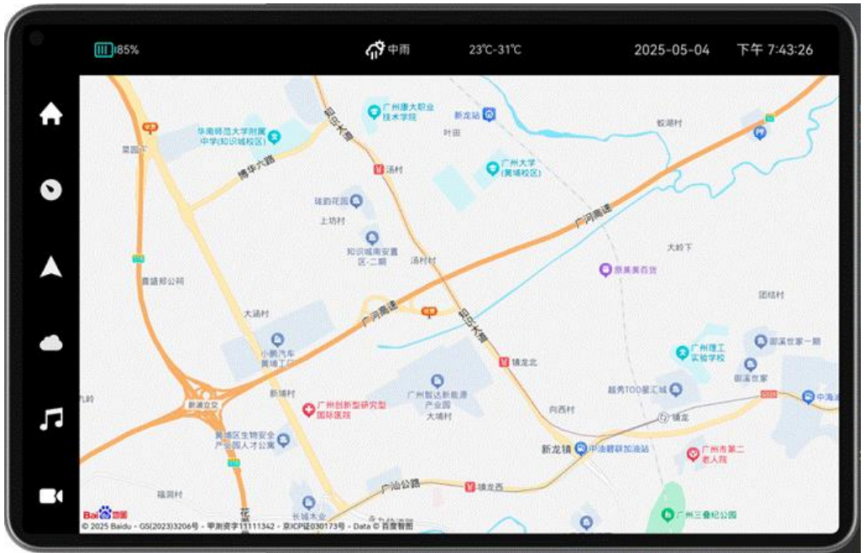
- 导航地图页:调用百度地图 JS API,基于南向 GPS 数据实现实时定位与路线规划,支持目的地搜索与周边地标显示;
- 天气信息页:对接高德天气 API,展示当前温度、湿度、风向及未来多日预报,数据可视化呈现;
- 多媒体娱乐页:音乐播放支持播放 / 暂停、模式切换与个性化推荐,视频播放支持本地资源加载与关键词搜索。

核心功能代码片段
- 设备数据获取与解析:
typescript
运行
async InitDeviceData() {
// 获取华为云IoT访问令牌
const token = await this.iotAxios.getToken();
// 调用API获取设备影子数据
this.deviceData = await this.iotAxios.getDeviceShadow(token);
// 解析核心数据
this.temperature = this.deviceData.shadow[0].reported.properties.temperature;
this.humidity = this.deviceData.shadow[0].reported.properties.humidity;
this.speed = this.convertMotorLevelToSpeed(this.deviceData.shadow[0].reported.properties.motor_level);
this.ledState = this.deviceData.shadow[0].reported.properties.led;
this.latitude = this.deviceData.shadow[0].reported.properties.latitude;
this.longitude = this.deviceData.shadow[0].reported.properties.longitude;
// 刷新界面
this.stateUpdate();
console.log(`设备数据更新:温度${this.temperature}℃,车速${this.speed}km/h`);
}
// 电机挡位转车速
convertMotorLevelToSpeed(level: number): number {
switch(level) {
case 0: return 0;
case 1: return 10;
case 2: return 30;
case 3: return 50;
case 4: return 70;
case 5: return 90;
default: return 0;
}
}
- AI 助手交互实现:
typescript
运行
async handleAiQuery(input: string) {
this.aiLoading = true;
try {
// 发送查询请求到DeepSeek API
const response = await fetch('https://api.deepseek.com/chat/completions', {
method: 'POST',
headers: {
'Content-Type': 'application/json',
'Authorization': `Bearer ${this.aiApiKey}`
},
body: JSON.stringify({
model: 'deepseek-chat',
messages: [{ role: 'user', content: input }],
stream: true
})
});
// 处理流式响应
const reader = response.body?.getReader();
if (reader) {
let result = '';
while(true) {
const { done, value } = await reader.read();
if (done) break;
result += new TextDecoder().decode(value);
this.aiResponse = result;
}
// 解析设备控制指令
this.parseAiControlCommand(this.aiResponse);
}
} catch (error) {
this.aiResponse = '请求失败,请重试';
console.error('AI交互错误:', error);
} finally {
this.aiLoading = false;
}
}
// 解析AI控制指令
parseAiControlCommand(response: string) {
if (response.includes('打开左转向灯')) {
this.sendControlCommand('led', 'LEFT_ON');
} else if (response.includes('打开右转向灯')) {
this.sendControlCommand('led', 'RIGHT_ON');
} else if (response.includes('关闭转向灯')) {
this.sendControlCommand('led', 'OFF');
} else if (response.includes('设置挡位')) {
const levelMatch = response.match(/挡位(\d)/);
if (levelMatch && levelMatch[1]) {
this.sendControlCommand('motor_level', parseInt(levelMatch[1]));
}
}
}
3.3 分布式通信实现
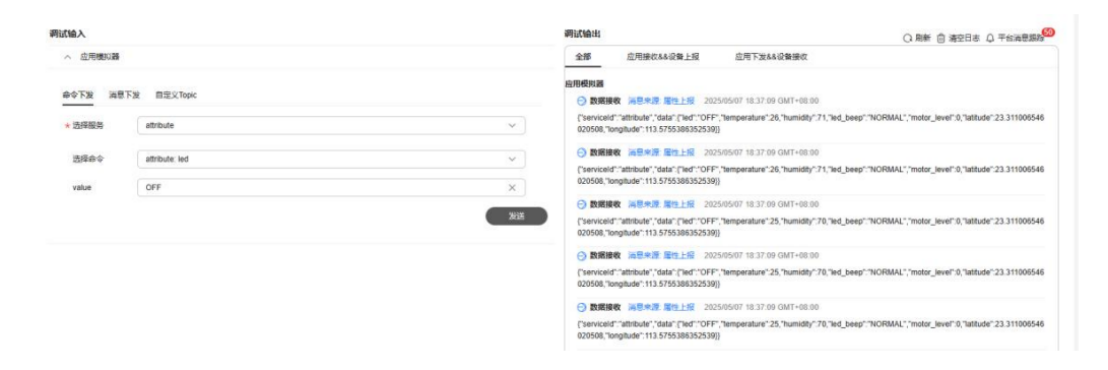
- 指令传输流程:北向大屏→JSON 格式封装指令→MQTT 协议发布至 “device/control” 主题→华为云 IoT 平台转发→Hi3861 MQTT 客户端接收→解析执行→状态通过 “device/status” 主题回传→北向界面刷新;
- 典型指令格式:
json
{
"deviceType": "light",
"action": "turnOn",
"target": "left",
"parameter": { "frequency": 1 }
}
- 传输保障:采用 QoS1 服务质量等级,确保消息至少送达一次,弱网环境下启用指数退避重连机制,数据上传成功率 > 98%。
四、系统测试
4.1 测试环境
- 硬件环境:普中 Hi3861 开发板、12.3 英寸车载大屏模拟器、DS18B20 传感器、SIM808 模块、DC12V 电机、RGB 灯组;
- 软件环境:DevEco Studio 5.0、HarmonyOS 5.0 SDK、华为云 IoT 平台、MQTT.fx、Wireshark;
- 测试工具:串口调试助手(PuTTY)、万用表、温湿度校准仪、GPS 信号模拟器。
4.2 南向测试结果
| 测试项 | 测试场景 | 测试结果 |
|---|---|---|
| 传感器采集 | 25℃标准环境,30-80% RH 湿度 | 温度误差≤±0.3℃,湿度误差≤±2% RH,更新间隔≤1 秒 |
| 电机控制 | 0-5 挡切换 | 0 挡关机,1 挡转速最小,5 挡转速最大,响应延迟≤300ms |
| 灯光控制 | 左转向 / 右转向 / 双闪模式 | 左转向 1Hz±0.2 闪烁,双闪同步闪烁,状态反馈准确 |
| MQTT 通信 | 网络波动(断网 5 秒) | 自动重连成功,未丢失关键数据,通信延迟≤50ms |
| 低功耗测试 | 无数据变化场景 | 休眠电流≤10mA,相比持续运行省电 72% |
4.3 北向测试结果
| 测试项 | 核心测试点 | 测试结果 |
|---|---|---|
| 数据可视化 | 车速、温湿度、经纬度展示 | 仪表盘动态更新,异常值红色预警,展示无延迟 |
| AI 交互 | 文字输入控制指令 | 指令识别准确率≥95%,设备响应延迟≤1 秒 |
| 导航功能 | GPS 定位与路线规划 | 定位误差≤10 米,路线规划准确,地图加载流畅 |
| 多模态交互 | 触控 + AI 指令切换 | 操作逻辑清晰,界面与设备状态实时同步 |
| 稳定性测试 | 连续运行 24 小时 | 无崩溃现象,数据传输成功率 99.2% |




五、结束语
本研究基于 HarmonyOS 成功设计实现了智能座舱系统,通过 “南向硬件 - 云端服务 - 北向应用” 的端云协同架构,有效解决了传统座舱系统设备协同低效、交互复杂、扩展性差等痛点。核心成果包括:南北向设备解耦实现灵活扩展,双模态交互提升驾驶安全性,低功耗设计适配车载场景,数据闭环机制保障状态同步。
系统已完成核心功能验证,后续将重点优化:增加边缘计算模块降低云端依赖,扩展语音交互提升自然度,接入空调、座椅调节等更多车控功能,适配车载摄像头、HUD 等鸿蒙设备,构建全场景智能座舱生态。
HarmonyOS 的分布式特性与国产化优势,为车载智能系统提供了全新发展路径。本方案的工程实践经验,可为智能汽车产业的自主创新提供参考,助力国产车载操作系统打破国外技术垄断。

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐


 25
25 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)