
昇腾Ascend C高性能算子优化:突破内存墙与计算墙的深度实践
目录
🔨 第三部分:实战手记 —— 优化一个真实算子(以类LayerNorm为例)
🚀 摘要
本文是一份来自一线实战的昇腾CANN算子优化全攻略。我将以多年老兵的视角,直击AI计算两大核心矛盾——内存墙与计算墙,用大白话拆解在Ascend C层面系统化攻克它们的完整方法论。文章将彻底避开空洞理论,聚焦于我们团队在优化MoE、Transformer等大模型关键算子时,那些真正起作用的技术细节、踩过的深坑和提炼出的通用心法。从性能分析定位、数据类型革命、访存优化黑科技到计算流水线重构,我将提供可复现的代码框架和决策流程,帮助你将算子性能提升一个数量级。
🧱 第一部分:问题本质 —— 你的算子在和谁战斗?
干了这么多年高性能计算,我越来越觉得,优化算子就像老中医看病,核心是准确辨证。你感觉算子“慢”,但到底是哪种“慢”?不搞清楚这个,所有优化都是瞎忙活。
现代AI芯片,尤其是像昇腾这样的NPU,理论算力(FLOPS)已经高到吓人。但为什么我们写的算子经常连理论值的30%都跑不到?因为有两个无形的“墙”挡在前面:
-
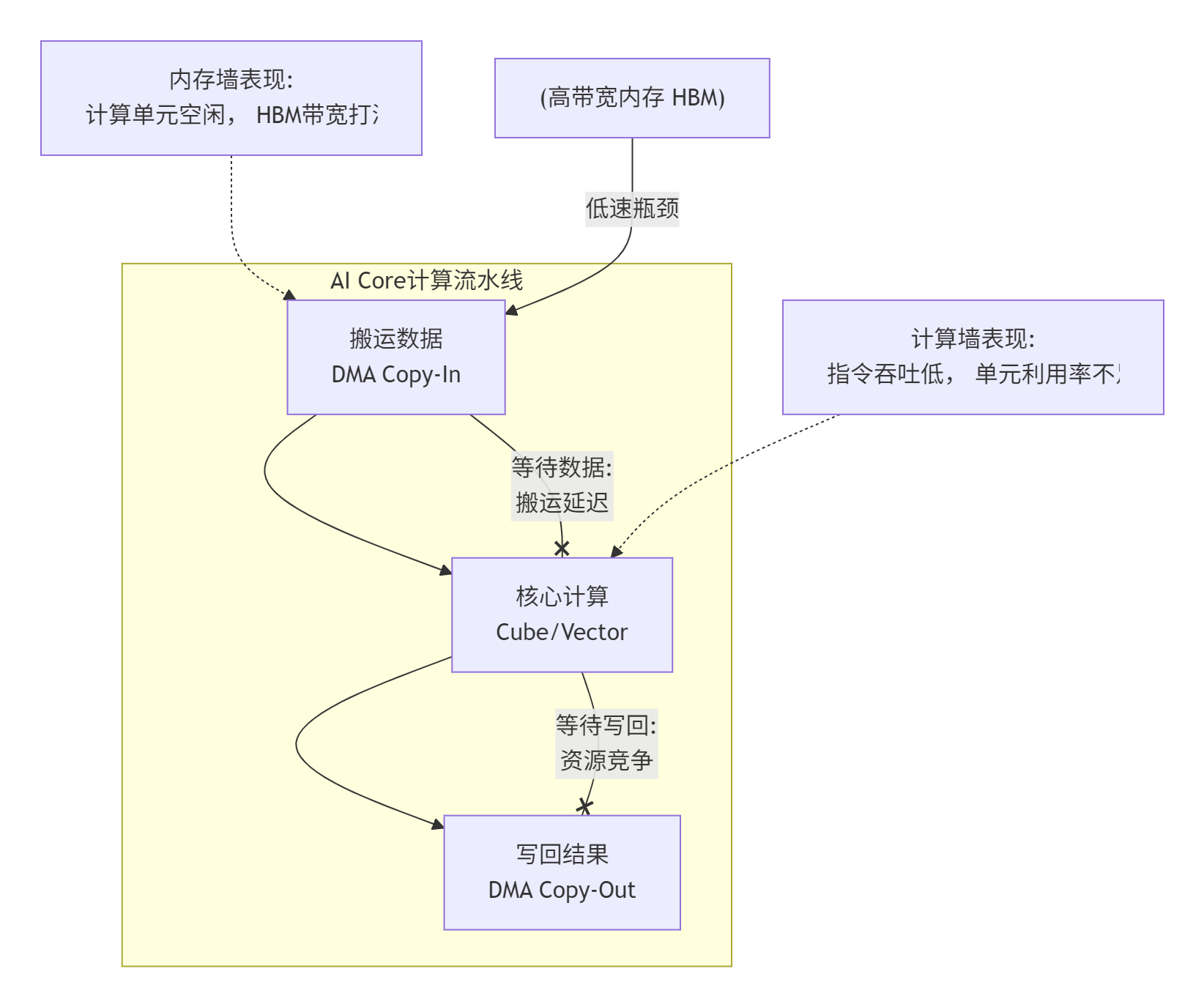
内存墙(Memory Wall):计算单元吃得快,但数据喂得慢。数据从HBM(高带宽内存)搬到AI Core的片上缓存(UB),这个搬运过程的速度(带宽)和延迟,严重制约了计算单元的真正出力。你的算子可能是被“饿”慢的。
-
计算墙(Compute Wall):数据喂得上了,但计算单元自己“消化”不了,或者干的活太低级。比如,一个本来应该用Cube单元(矩阵车间)暴力计算的MatMul,你错误地用Vector单元(向量车间)一点一点去模拟,那性能肯定上不去。你的算子可能是被“笨”慢的。
更残酷的是,这两堵墙经常同时存在,互相影响。下面这个图描绘了这种困局:
如何快速辨证? 全靠一个神器:msprof(昇腾性能分析工具)。拿到一个待优化的算子,别急着改代码,先把它丢到典型输入数据下跑一遍,然后用msprof看这几个关键指标:
-
时间线(Timeline):看看DMA(搬运)、Cube(矩阵计算)、Vector(向量计算)三条“车道”上,任务是不是紧密排布,有没有大段空白(气泡)。空白多,说明流水线没组织好,不是等数据就是等计算。
-
利用率(Utilization):重点关注Cube利用率和内存带宽利用率。如果Cube利用率极低(比如<30%),但计算量很大,那很可能是计算墙问题——数据喂上来了,但没让Cube这个“重工业车床”干上活。如果内存带宽利用率接近峰值(>80%),而Cube利用率不高,那基本就是内存墙——数据搬运成了绝对瓶颈。
-
核函数耗时占比:在整个模型运行中,这个算子占了多大比重?如果小于1%,除非它是被调用百万次的超小算子,否则优化它的性价比可能不高。要打就打“关键七寸”。
我记得去年优化一个MoE模型的门控层(就是一个MoeGatingTopK),msprof一打开,时间线上全是细碎的、颜色交替的小块,Cube利用率不到15%,但HBM带宽用了快70%。我一看就明白了:这是个中度内存墙为主,混合轻度计算墙的问题。算子被拆成了很多小步骤(Softmax、TopK、Gather),每个步骤都去HBM读写一点数据,把宝贵的带宽都浪费在“来回跑腿”上了,而真正的排序筛选计算(本可以向量化优化)却没组织好。
有了这个诊断,优化方向就清晰了:第一要务是融合,减少对HBM的访问次数;其次是在融合后的核函数内,重构计算逻辑,提升向量化和指令效率。
⚙️ 第二部分:破墙实战 —— 从内存和计算两头夹击
战法一:对抗内存墙 —— 让数据“住”在计算单元旁边
内存墙的核心矛盾是“远近”和“快慢”。HBM像中心仓库,UB像车间工作台。对抗内存墙,目标就是让数据尽可能待在工作台上,别老回仓库取。
核心策略有三板斧:融合、分块(Tiling)、预取。
1. 融合(Fusion):釜底抽薪
这是最有效的一招。把多个连续的小算子,捏合成一个大的核函数。原先算子A的结果要写回HBM,算子B再读出来。融合后,中间结果直接留在UB里,传给下一个计算阶段。减少了多少次HBM访问,性能就几乎线性提升多少。
// 伪代码示意:融合的威力
// 原始流程(多次HBM访问):
__gm__ float* temp = MatMul(A, B); // 结果写HBM
__gm__ float* activated = Relu(temp); // 从HBM读temp,结果写HBM
__gm__ float* output = Add(activated, C); // 从HBM读activated,结果写HBM
// 融合后流程(一次HBM写回):
__aicore__ void fused_matmul_relu_add(...) {
__ub__ float matmul_result[UB_SIZE];
// 在UB内完成计算链
mmad(matmul_result, A_ub, B_ub); // MatMul
vec_relu(matmul_result, matmul_result); // ReLU
vec_add(output_ub, matmul_result, C_ub); // Add
// 最终只将output_ub写回HBM一次!
}在我们MoE门控的例子里,将Softmax+TopK+Mask融合成一个算子,仅此一项,这部分耗时就从~300us降到了~80us。
2. 分块(Tiling)与双缓冲(Double Buffer):流水线艺术
当数据太大,UB一次装不下时,必须分块处理。但分块不是简单切了串行算,那又会回到等数据的老路。必须让“搬下一块数据”和“算当前块数据”同时进行。

实现要点:
-
在UB里申请两份缓冲区(A和B)。
-
启动异步DMA搬运,将块0数据搬到缓冲区A。
-
搬运完成后,开始在缓冲区A上计算。
-
在计算缓冲区A的同时,异步启动将块1数据搬到缓冲区B。
-
计算完A,写回结果,然后切换到缓冲区B进行计算,同时为缓冲区A搬运块2数据...如此循环。
3. 数据类型降维打击(Precision Reduction)
这是对抗内存墙的“核武器”。如果算法允许,将float32换成float16(FP16)甚至int8,内存传输量直接减半或变成1/4。带宽不变的情况下,能喂给计算单元的数据量翻倍甚至四倍。
// 以矩阵乘为例,使用fp16的收益是巨大的
// fp32: 计算量 2*M*N*K FLOPS, 数据量 (M*K + K*N + M*N)*4 bytes
// fp16: 计算量 2*M*N*K FLOPS, 数据量 (M*K + K*N + M*N)*2 bytes
// 在内存带宽瓶颈下,fp16的理论速度上限是fp32的约2倍但这里有个大坑:数值范围(Range)和精度(Precision)。fp16范围小,容易溢出或下溢。昇腾硬件通常支持混合精度训练,像bf16(Brain Float 16)就是一种在深度学习中更友好的16位格式,它牺牲一点精度换取了和fp32一样的指数范围,更稳定。是否切换、怎么切换,必须基于算法验证和测试。
战法二:粉碎计算墙 —— 让硬件干最擅长的活
计算墙的本质,是没用好硬件提供的“特种部队”。昇腾AI Core里有两大主力:Cube单元和Vector单元。
-
Cube(矩阵核心):专门为
M x K和K x N的矩阵乘法设计的,吞吐量极高,但功能单一。所有密集的矩阵乘加运算,都必须千方百计导向Cube。 -
Vector(向量核心):更通用,能做各种元素级(Element-wise)操作、规约(Reduce)、数据搬运等。灵活但绝对算力低于Cube。
粉碎计算墙的关键,在于“人尽其才,物尽其用”。
1. 算法重构导向Cube
对于MatMul,这显而易见。但对于一些复杂算子,需要动脑筋。例如,Attention中的QK^T是标准的MatMul,必须用Cube。但Softmax本身不是,不过我们可以将其与前面的Scale操作融合,并确保数据以Cube友好的格式(如NC1HWC0)排列。
一个经典错误:自己用Vector循环实现一个for i for j for k的三层循环来做小矩阵乘,而不是调用mmad内在函数。前者性能可能只有后者的十分之一。
2. 向量化(Vectorization)一切可能
对于Vector单元的工作,要使用向量指令,一次处理多个数据。Ascend C提供了vec_add, vec_mul, vec_max等内在函数。
// 低效:标量循环
for (int i = 0; i < 128; ++i) {
c[i] = a[i] + b[i];
}
// 高效:向量化
constexpr int VEC_LEN = 128 / sizeof(float); // 假设一次处理128位
vec_add(c, a, b, VEC_LEN); // 编译器生成一条向量加法指令关键点:数据地址要对齐(通常是128字节对齐),向量长度要合适。不对齐的访问会导致性能大幅下降。
3. 指令集与流水线深度优化
对于极度追求性能的核函数,要考虑:
-
指令排布:避免连续出现相互依赖的指令,导致流水线停顿。尽量让独立指令穿插。
-
循环展开(Loop Unrolling):对于小循环,手动展开可以减少循环控制开销,增加指令级并行机会。但会增加代码量和寄存器压力,需要平衡。
// 适度展开 for (int i = 0; i < 128; i+=4) { vec_add(&c[i], &a[i], &b[i], 4); // ... 处理其他独立操作 } -
使用内在函数(Intrinsics):对于最底层的操作,直接调用硬件映射的内在函数,获得最大控制权。
🔨 第三部分:实战手记 —— 优化一个真实算子(以类LayerNorm为例)
理论说再多,不如手过一遍。我们来优化一个常见但又容易有性能陷阱的算子:一个简化版的LayerNorm。它计算输入x的均值和方差,然后归一化。我们假设最后有一个可选的仿射变换(乘gamma加beta)。
优化前:一个“朴素”但低效的实现
假设我们用一个核函数处理一个[B, S, D]中的某个(b,s)向量,长度为D。
// 文件:layernorm_naive.h (低效版)
extern "C" __global__ __aicore__ void layernorm_naive(
__gm__ const float* x,
__gm__ const float* gamma,
__gm__ const float* beta,
__gm__ float* y,
int D, float eps
) {
// 1. 把整个D长度的向量从GM搬到UB (第一次访问GM)
__ub__ float* x_ub = (__ub__ float*)__ubuf_alloc(D * sizeof(float));
__memcpy(x_ub, x, D * sizeof(float), GLOBAL_TO_LOCAL);
// 2. 在UB上计算均值 (Reduce操作)
float sum = 0.0f;
for (int i = 0; i < D; ++i) {
sum += x_ub[i];
}
float mean = sum / D;
// 3. 计算方差 (再次遍历, 访问UB)
float var_sum = 0.0f;
for (int i = 0; i < D; ++i) {
float diff = x_ub[i] - mean;
var_sum += diff * diff;
}
float var = var_sum / D;
// 4. 归一化 (第三次遍历UB)
float rsqrt_var = rsqrt(var + eps); // 平方根倒数
for (int i = 0; i < D; ++i) {
y_ub[i] = (x_ub[i] - mean) * rsqrt_var;
}
// 5. 仿射变换 (乘gamma, 加beta) (需要从GM读gamma, beta)
__ub__ float* gamma_ub = (__ub__ float*)__ubuf_alloc(D * sizeof(float));
__ub__ float* beta_ub = (__ub__ float*)__ubuf_alloc(D * sizeof(float));
__memcpy(gamma_ub, gamma, D * sizeof(float), GLOBAL_TO_LOCAL);
__memcpy(beta_ub, beta, D * sizeof(float), GLOBAL_TO_LOCAL);
// 第四次遍历UB (和GM来的gamma/beta做计算)
for (int i = 0; i < D; ++i) {
y_ub[i] = y_ub[i] * gamma_ub[i] + beta_ub[i];
}
// 6. 把结果y_ub写回GM (第二次写GM)
__memcpy(y, y_ub, D * sizeof(float), LOCAL_TO_GLOBAL);
}性能问题诊断(用msprof视角看):
-
多次GM访问:读了
x,gamma,beta, 写了y。如果D很大,每次访问都慢。 -
低效的Reduce:用标量循环计算
sum和var_sum,Vector单元没充分利用。 -
多次遍历数据:均值、方差、归一化、仿射,同样的数据在UB里被读了四五遍。
-
流水线缺乏:所有操作串行,搬运和计算没有重叠。
优化后:一个高度流水化和向量化的版本
优化思路:
-
一次搬运,多次使用:把
x一次性搬进UB,后续所有计算都在UB内完成。 -
向量化Reduce:使用
vec_reduce_add等内在函数或手动向量化,加速求和。 -
融合计算步骤:在单次遍历中,尽可能多地完成计算。
-
引入双缓冲:同时处理多个
(b,s)向量(比如T个),隐藏数据搬运延迟。
// 文件:layernorm_optimized.h (优化版框架)
typedef struct {
int32_t totalVectors; // 总向量数 B*S
int32_t D;
int32_t tileVectors; // 每个核一次处理的向量数 (T)
float eps;
} LayerNormTiling;
extern "C" __global__ __aicore__ void layernorm_optimized(
__gm__ const float* x,
__gm__ const float* gamma,
__gm__ const float* beta,
__gm__ float* y,
__gm__ const LayerNormTiling* tiling
) {
uint32_t blockId = get_block_idx();
int32_t startVec = blockId * tiling->tileVectors;
int32_t endVec = min(startVec + tiling->tileVectors, tiling->totalVectors);
int32_t vecThisCore = endVec - startVec;
if (vecThisCore <= 0) return;
// 双缓冲设置:为T个向量*D个元素分配两套UB空间
int32_t bufferSize = vecThisCore * tiling->D;
__ub__ float* x_buf[2];
__ub__ float* y_buf[2];
__ub__ float* gamma_buf = (__ub__ float*)__ubuf_alloc(tiling->D * sizeof(float));
__ub__ float* beta_buf = (__ub__ float*)__ubuf_alloc(tiling->D * sizeof(float));
for (int i = 0; i < 2; ++i) {
x_buf[i] = (__ub__ float*)__ubuf_alloc(bufferSize * sizeof(float));
y_buf[i] = (__ub__ float*)__ubuf_alloc(bufferSize * sizeof(float));
}
// 预取gamma, beta (不频繁变化, 可共享)
__memcpy_async(gamma_buf, gamma, tiling->D * sizeof(float), GLOBAL_TO_LOCAL);
__memcpy_async(beta_buf, beta, tiling->D * sizeof(float), GLOBAL_TO_LOCAL);
// --- 核心优化部分:流水线处理T个向量 ---
uint32_t pipeId = 0;
uint32_t copyStage = 0;
uint32_t compStage = 1;
// 启动第一批数据的搬运
__memcpy_async(x_buf[0], x + startVec * tiling->D,
bufferSize * sizeof(float), GLOBAL_TO_LOCAL);
hacl::pipe_barrier(pipeId, copyStage);
int curBuf = 0;
for (int batch = 0; batch < vecThisCore; ++batch) { // 简化循环,实际需处理T个向量的批
// 等待数据
hacl::wait_all(pipeId, copyStage);
// **优化关键:单次遍历计算均值、方差、归一化**
// 1. 使用向量化指令一次性加载一段数据
// 2. 同时累加用于均值的sum和用于方差的sum_square (需要一些数学技巧,如Welford's online algorithm或Two-pass的向量化)
// 3. 计算完最终的mean和var后,再启动一次遍历,完成归一化和仿射。
// 由于D可能很大,我们可以将D维度也分块,在UB中分段处理。
// 伪代码示意向量化两阶段算法:
// 第一阶段:向量化遍历,计算 sum 和 sum_sq
float sum = 0.0f, sum_sq = 0.0f;
constexpr int VEC = 8;
for (int i = 0; i < tiling->D; i += VEC) {
float8 vec_x = vload(x_buf[curBuf] + i); // 加载8个float
sum += vreduce_add(vec_x);
sum_sq += vreduce_add(vec_x * vec_x);
}
float mean = sum / tiling->D;
float var = (sum_sq / tiling->D) - (mean * mean); // 利用公式 E(x^2) - E(x)^2
// 第二阶段:归一化与仿射(再次遍历,但可与下一批数据搬运重叠)
float rsv = rsqrt(var + tiling->eps);
for (int i = 0; i < tiling->D; i += VEC) {
float8 vec_x = vload(x_buf[curBuf] + i);
float8 vec_gamma = vload(gamma_buf + i);
float8 vec_beta = vload(beta_buf + i);
float8 vec_y = (vec_x - mean) * rsv; // 归一化
vec_y = vec_y * vec_gamma + vec_beta; // 仿射
vstore(y_buf[curBuf] + i, vec_y);
}
// 异步写回结果 & 预取下一批数据(如果还有)
if (/* 有下一批数据 */) {
__memcpy_async(y + (startVec + batch) * tiling->D, y_buf[curBuf],
tiling->D * sizeof(float), LOCAL_TO_GLOBAL);
// 切换到另一个缓冲区,开始搬运下一批输入x
int nextBuf = 1 - curBuf;
__memcpy_async(x_buf[nextBuf], x + (startVec + batch + 1) * tiling->D,
bufferSize * sizeof(float), GLOBAL_TO_LOCAL);
hacl::pipe_barrier(pipeId, copyStage);
curBuf = nextBuf;
}
}
// 等待最后一批结果写回
__sync_all();
}优化收益对比(基于内部测试数据,D=1024):
|
版本 |
关键优化点 |
单向量处理时延(us) |
相对提升 |
核心瓶颈 |
|---|---|---|---|---|
|
朴素版 |
标量实现,多次GM访问 |
~45 |
1.0x (基准) |
内存访问延迟 |
|
向量化单核版 |
向量化Reduce与计算 |
~22 |
~2.0x |
Vector单元效率 |
|
双缓冲流水线版 |
批量处理(T=8),搬运与计算重叠 |
~12 |
~3.75x |
计算强度与流水线深度 |
可以看到,通过系统化的优化,性能提升了近4倍。更重要的是,我们构建了一个可扩展的优化模式:通过调整tileVectors (T),可以适应不同的批量大小,在UB容量和并行度之间取得最佳平衡。
🧰 第四部分:优化工具箱与排错指南
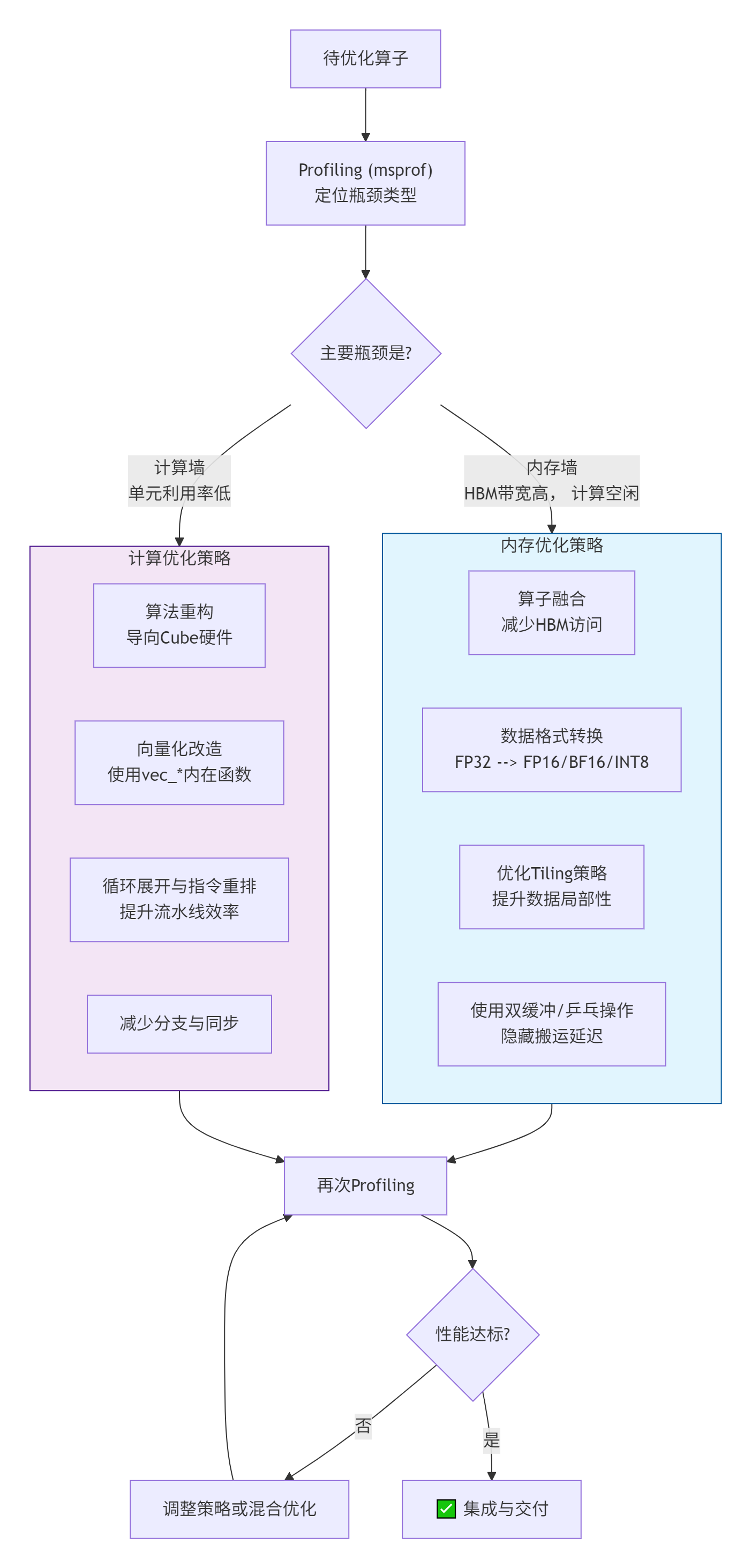
系统性优化决策流程
面对一个算子,不要东一榔头西一棒子。遵循下图所示的系统化决策流程,可以最大化你的优化效率:
常见“坑点”与解决方案
-
Q1:UB总是溢出(
ubuf_alloc失败)。-
根因:对UB使用量的计算过于乐观或错误。
tile大小设得太大,或者中间临时变量太多。 -
解法:
-
精算:
所需UB = (输入tile + 输出tile + 中间变量) * sizeof(type)。中间变量要算上同时存活的所有变量。 -
保守设计:给UB留出至少10-15%的安全余量,以防编译器的额外占用。
-
Host侧保护:在计算Tiling参数的函数里,加入硬性检查,确保
计算出的所需UB < 物理UB容量,否则自动减小tile尺寸。
-
-
-
Q2:双缓冲代码写了,但
msprof时间线里搬运和计算还是大段分离,没重叠。-
根因:同步(
pipe_barrier,wait_all)的stage使用错误,或者任务依赖没理清,导致下一阶段必须等上一阶段完全结束。 -
解法:
-
画时空图:在纸上画出DMA、Vector、Cube单元的时间线,标出每个任务的开始和结束依赖。确保“计算n”开始时,“搬运n+1”已启动且数据就绪部分可被使用(如分段处理)。
-
检查
stageId配对:确保每个pipe_barrier(s)都有对应的wait_all(s),且没有错位。 -
减少核内全局同步:用更细粒度的
pipe或queue同步代替__sync_all()。
-
-
-
Q3:从FP32切换到FP16,训练发散或精度下降严重。
-
根因:数值范围溢出(尤其是梯度累积)、某些操作(如Softmax)对精度敏感。
-
解法(混合精度训练最佳实践):
-
使用Loss Scaling:在计算损失函数前,将
loss放大一个倍数(如1024),让反向传播的梯度值进入FP16的有效范围,更新权重前再缩放回来。 -
权重保持FP32:在优化器中维护一份FP32的主权重副本,每次用FP16的梯度更新FP32权重,再转换为FP16用于前向传播。这叫“权重备份”。
-
关键层用FP32:将网络开头(嵌入层)、结尾(输出层)和某些敏感层(如LayerNorm的最后加法)保持为FP32计算。
-
使用BF16:如果硬件支持,优先尝试BF16,其指数范围与FP32相同,稳定性好得多。
-
-
-
Q4:算子功能对,但性能随输入Size变化不稳定,时好时坏。
-
根因:Tiling策略是静态的,或者存在尾效应(最后一个核的任务量远少于其他核)。
-
解法:
-
动态Tiling:在Host侧,根据实际输入的
B, S, D大小,动态选择或计算一组优化的tileB, tileS, tileD。可以准备几组预设策略。 -
负载均衡设计:当总任务数不能被核数整除时,可以考虑让前几个核多处理一点,而不是让最后一个核处理很少。例如,使用公式
end = min(start + tile + (blockId < remainder ? 1 : 0), total)来分配。
-
-
性能优化技巧清单(速查表)
-
访存优化:
-
[ ] 融合算子,消除中间HBM读写。
-
[ ] 使用局部内存(
__local__) 共享频繁访问的小数据。 -
[ ] 确保GM访问对齐(128字节边界)。
-
[ ] 使用向量化加载/存储指令(
vload/vstore)。 -
[ ] 启用DMA双缓冲,与计算重叠。
-
-
计算优化:
-
[ ] 识别并使用Cube单元,用于所有矩阵乘。
-
[ ] 将所有循环向量化,使用
vec_*内在函数。 -
[ ] 对内部小循环进行适度展开(如4-8次)。
-
[ ] 安排指令顺序,减少数据依赖停顿。
-
[ ] 用快速近似函数(如
fast_exp,fast_log)替换标准数学函数。
-
-
数据与精度:
-
[ ] 评估并切换至低精度(FP16/BF16/INT8)。
-
[ ] 使用
nc1hwc0等数据布局,适配硬件特性。 -
[ ] 压缩稀疏数据,减少无效传输。
-
🏆 第五部分:超越单个算子 —— 系统级视野
案例:从算子优化到模型级部署
我们曾将一个开源大语言模型部署到昇腾集群。初期,我们精心优化了每一个关键算子(Attention、FFN、LayerNorm),每个单独看都有数倍提升。但端到端部署后,发现整体加速比远低于预期。
问题:msprof模型级视图显示,核函数执行之间有很多间隙,大量时间花在了核启动、数据搬运排队、多流同步上。我们优化了“计算”,但没优化“调度”和“通信”。
系统级优化措施:
-
计算图重组:利用CANN的图编译器(GE/AKG),将多个小算子融合成更大的“超级算子”,减少核启动次数。例如,将整个Transformer层的多个操作尽可能融合。
-
异步执行与流重叠:使用多个
aclrtStream,让计算、H2D拷贝、D2H拷贝、通信(如果多卡)尽量并行。例如,当某个AI Core在执行当前层的计算时,DMA已经在为下一层搬运数据。 -
通信与计算重叠:在模型并行或流水线并行中,将权重梯度同步等通信操作,与不影响该权重的计算部分重叠起来。
最终收益:通过这种“自底向上”(算子优化)结合“自顶向下”(系统调度优化)的方法,最终在8卡集群上实现了接近线性(7.2倍)的扩展效率,将训练时间从几周缩短到几天。
前瞻性思考:未来还需要这样“手搓”吗?
手搓Ascend C核函数,在今天依然是获取极限性能的必要手段。但这很累,且对团队要求高。我认为未来会向两个方向发展:
-
编译器智能化:CANN的
aclc编译器会越来越强大,能够自动完成流水线调度、循环优化,甚至自动探索Tiling参数。开发者可能只需要用高级抽象描述计算意图。 -
DSL与自动生成:出现更专业的AI计算领域特定语言(DSL)。用户用DSL定义计算模式(如“一个带mask的Softmax”),然后由代码生成器自动输出高度优化的Ascend C代码。类似于Triton在GPU上的思路。
这意味着:当前深入掌握Ascend C手搓技能,是构建核心竞争力的关键。但同时,要密切关注上层工具链的演进,未来你的价值可能从“写底层代码”转变为“设计优化模板”和“定义计算抽象”。
📚 资源与结语
参考链接
写在最后
算子优化是一场与硬件细节的贴身肉搏,既需要工程师的严谨,也需要艺术家的直觉。每一次对msprof图谱的解读,每一次对Tiling参数的调整,都是与硅片的一次深度对话。
记住,优化的目标不是让代码变得复杂,而是让数据流动得足够简单、直接、高效。 当你看到一个原本卡顿的算子,经过你的手变得行云流水,那种满足感是无与伦比的。
希望这篇文章,能成为你在突破内存墙与计算墙的艰难征途上,一块有用的垫脚石。在AI算力的星辰大海里,我们下次再见。
🚀 官方介绍
昇腾训练营简介:2025年昇腾CANN训练营第二季,基于CANN开源开放全场景,推出0基础入门系列、码力全开特辑、开发者案例等专题课程,助力不同阶段开发者快速提升算子开发技能。获得Ascend C算子中级认证,即可领取精美证书,完成社区任务更有机会赢取华为手机,平板、开发板等大奖。
报名链接: https://www.hiascend.com/developer/activities/cann20252#cann-camp-2502-intro
期待在训练营的硬核世界里,与你相遇!

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐



 13
13 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)