
Ascend C矩阵乘法深度优化:向量化、双缓冲与批处理完整实现
第一章 矩阵乘法在AI计算中的核心地位
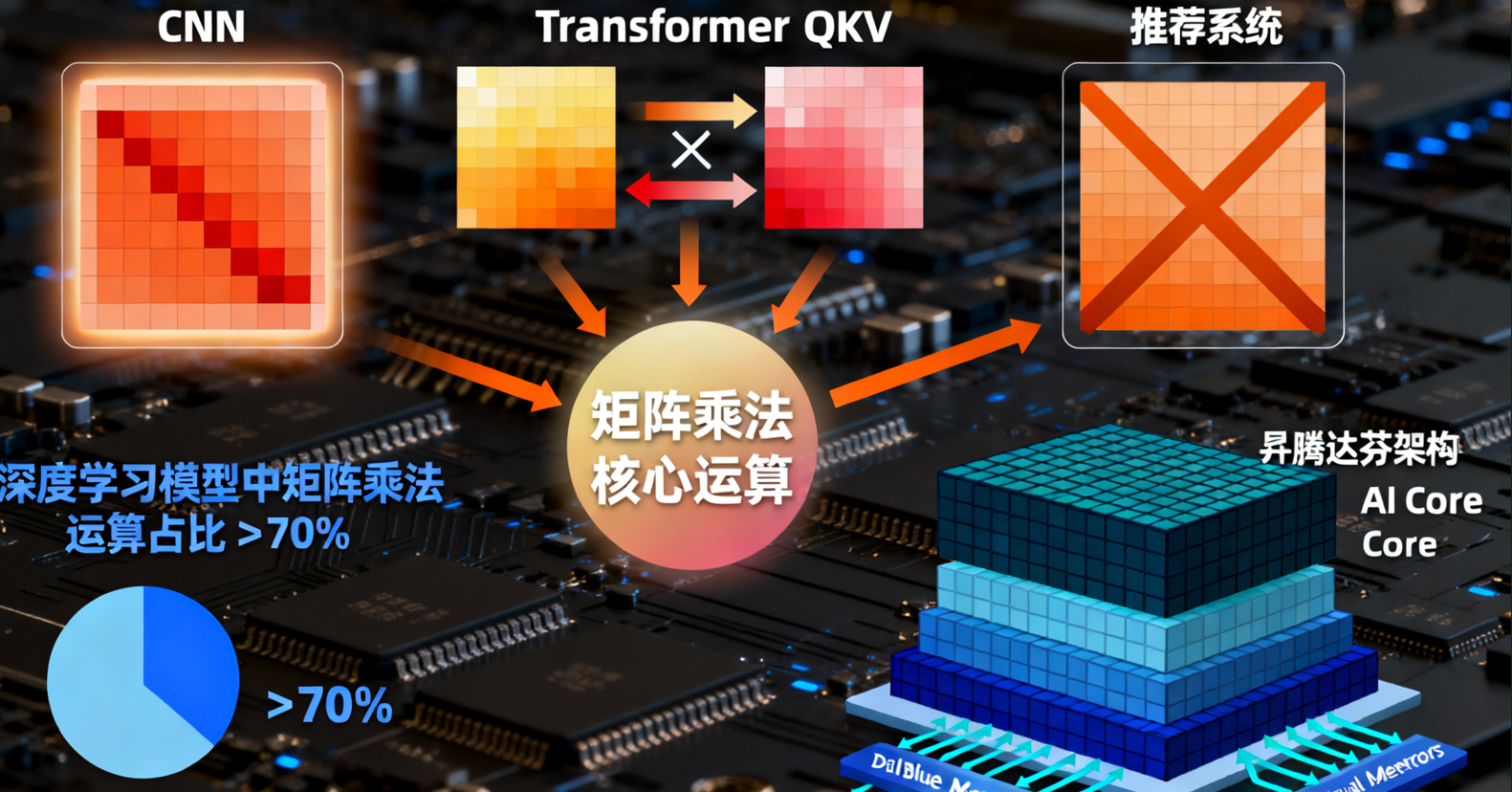
矩阵乘法是人工智能计算中最基础、最核心的运算操作之一。从卷积神经网络中的卷积运算,到Transformer模型中的自注意力机制,再到推荐系统中的特征交叉计算,矩阵乘法都扮演着不可或缺的角色。在现代深度学习模型中,矩阵乘法运算通常占据了超过70%的计算量,其性能直接影响着整个模型的推理效率和训练速度。
矩阵乘法的数学基础可以表示为:对于两个矩阵A(M×K)和B(K×N),它们的乘积C(M×N)中的每个元素计算为C[i][j] = Σ(A[i][k] * B[k][j]),其中k从0到K-1。这个看似简单的运算却蕴含着巨大的计算复杂度和优化空间。
矩阵乘法的计算特性使其成为衡量AI加速器性能的重要基准。首先,它具有O(MNK)的计算复杂度,但只有O(MK + KN + M*N)的内存访问量,这为计算优化提供了理论上的优势。其次,矩阵乘法具有规则的数据访问模式,适合进行向量化和并行化优化。再者,通过分块技术可以充分利用缓存局部性,大幅提升计算效率。
在昇腾AI处理器上开发高性能的矩阵乘自定义算子,需要深入理解硬件架构特性。达芬奇架构采用计算立方体设计,专门针对矩阵运算进行了优化。每个AI Core包含强大的矩阵计算单元,支持高效的并行处理。同时,层次化的存储体系(全局内存、本地内存、寄存器)为数据重用提供了有力支持。
第二章 Ascend C矩阵乘算子基础实现
2.1 基础矩阵乘法实现
让我们从最简单的矩阵乘法实现开始,理解Ascend C编程的基本模式:
#include <aicore/vector_operations.h>
#include <aicore/memory_operations.h>
extern "C" __global__ __aicore__ void naive_matmul_kernel(
uint32_t blockDim,
uint32_t l2ctrl,
uint32_t buffer,
uint32_t length,
int32_t M, int32_t N, int32_t K) {
// 获取任务ID
uint32_t task_id = get_task_id();
uint32_t task_num = get_task_num();
// 计算每个任务处理的行数
int32_t rows_per_task = (M + task_num - 1) / task_num;
int32_t start_row = task_id * rows_per_task;
int32_t end_row = min(start_row + rows_per_task, M);
// 获取全局内存地址
GM_ADDR A_gm = GET_GLOBAL_BUFFER(buffer);
GM_ADDR B_gm = A_gm + M * K * sizeof(float);
GM_ADDR C_gm = B_gm + K * N * sizeof(float);
// 本地内存用于数据块
__local__ float A_tile[16][16];
__local__ float B_tile[16][16];
__local__ float C_tile[16][16];
// 处理分配的行
for (int i = start_row; i < end_row; i += 16) {
for (int j = 0; j < N; j += 16) {
// 初始化累加器
for (int ti = 0; ti < 16; ++ti) {
for (int tj = 0; tj < 16; ++tj) {
C_tile[ti][tj] = 0.0f;
}
}
// 分块矩阵乘法
for (int k = 0; k < K; k += 16) {
// 加载A的数据块
for (int ti = 0; ti < 16; ++ti) {
for (int tk = 0; tk < 16; ++tk) {
int global_i = i + ti;
int global_k = k + tk;
if (global_i < M && global_k < K) {
A_tile[ti][tk] = ((float*)A_gm)[global_i * K + global_k];
} else {
A_tile[ti][tk] = 0.0f;
}
}
}
// 加载B的数据块
for (int tk = 0; tk < 16; ++tk) {
for (int tj = 0; tj < 16; ++tj) {
int global_k = k + tk;
int global_j = j + tj;
if (global_k < K && global_j < N) {
B_tile[tk][tj] = ((float*)B_gm)[global_k * N + global_j];
} else {
B_tile[tk][tj] = 0.0f;
}
}
}
// 计算分块乘积
for (int ti = 0; ti < 16; ++ti) {
for (int tj = 0; tj < 16; ++tj) {
for (int tk = 0; tk < 16; ++tk) {
C_tile[ti][tj] += A_tile[ti][tk] * B_tile[tk][tj];
}
}
}
}
// 写回结果
for (int ti = 0; ti < 16; ++ti) {
for (int tj = 0; tj < 16; ++tj) {
int global_i = i + ti;
int global_j = j + tj;
if (global_i < M && global_j < N) {
((float*)C_gm)[global_i * N + global_j] = C_tile[ti][tj];
}
}
}
}
}
}这个基础实现虽然功能正确,但性能并不理想。它存在几个关键问题:内存访问模式不佳、计算资源利用率低、缺乏向量化优化等。接下来我们将逐步优化这个实现。
2.2 优化后的矩阵乘法实现
class OptimizedMatMul {
private:
static constexpr int BLOCK_SIZE = 64;
static constexpr int VECTOR_SIZE = 8;
public:
__global__ __aicore__ void optimized_matmul_kernel(
uint32_t blockDim, uint32_t l2ctrl, uint32_t buffer, uint32_t length,
int32_t M, int32_t N, int32_t K) {
uint32_t task_id = get_task_id();
uint32_t task_num = get_task_num();
// 更精细的任务划分
int32_t total_blocks = (M + BLOCK_SIZE - 1) / BLOCK_SIZE *
(N + BLOCK_SIZE - 1) / BLOCK_SIZE;
int32_t blocks_per_task = (total_blocks + task_num - 1) / task_num;
int32_t start_block = task_id * blocks_per_task;
int32_t end_block = min(start_block + blocks_per_task, total_blocks);
GM_ADDR A_gm = GET_GLOBAL_BUFFER(buffer);
GM_ADDR B_gm = A_gm + M * K * sizeof(float);
GM_ADDR C_gm = B_gm + K * N * sizeof(float);
// 双缓冲本地内存
__local__ float A_buf0[BLOCK_SIZE][BLOCK_SIZE];
__local__ float A_buf1[BLOCK_SIZE][BLOCK_SIZE];
__local__ float B_buf0[BLOCK_SIZE][BLOCK_SIZE];
__local__ float B_buf1[BLOCK_SIZE][BLOCK_SIZE];
__local__ float C_acc[BLOCK_SIZE][BLOCK_SIZE];
for (int block_idx = start_block; block_idx < end_block; ++block_idx) {
// 计算当前块的位置
int block_i = (block_idx * BLOCK_SIZE) / N;
int block_j = block_idx % (N / BLOCK_SIZE);
int start_i = block_i * BLOCK_SIZE;
int start_j = block_j * BLOCK_SIZE;
// 初始化累加器
for (int i = 0; i < BLOCK_SIZE; ++i) {
for (int j = 0; j < BLOCK_SIZE; j += VECTOR_SIZE) {
float8 zeros = {0.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0f, 0.0f};
vstore8(zeros, 0, &C_acc[i][j]);
}
}
int current_buffer = 0;
// 预加载第一个K块
if (K > 0) {
load_A_block(A_buf0, A_gm, start_i, 0, M, K, N);
load_B_block(B_buf0, B_gm, 0, start_j, K, N, M);
}
// 分块计算
for (int k_block = 0; k_block < K; k_block += BLOCK_SIZE) {
int next_k_block = k_block + BLOCK_SIZE;
// 异步预加载下一个块
if (next_k_block < K) {
__local__ float* next_A = (current_buffer == 0) ? A_buf1 : A_buf0;
__local__ float* next_B = (current_buffer == 0) ? B_buf1 : B_buf0;
load_A_block_async(next_A, A_gm, start_i, next_k_block, M, K, N);
load_B_block_async(next_B, B_gm, next_k_block, start_j, K, N, M);
}
// 等待当前块数据就绪
__sync_buffers();
// 获取当前缓冲区
__local__ float* current_A = (current_buffer == 0) ? A_buf0 : A_buf1;
__local__ float* current_B = (current_buffer == 0) ? B_buf0 : B_buf1;
// 向量化矩阵乘法
for (int i = 0; i < BLOCK_SIZE; ++i) {
for (int j = 0; j < BLOCK_SIZE; j += VECTOR_SIZE) {
float8 c_vec = vload8(0, &C_acc[i][j]);
for (int k = 0; k < BLOCK_SIZE; ++k) {
float8 a_vec = float8(current_A[i][k]);
float8 b_vec = vload8(0, ¤t_B[k][j]);
c_vec += a_vec * b_vec;
}
vstore8(c_vec, 0, &C_acc[i][j]);
}
}
// 切换缓冲区
current_buffer = 1 - current_buffer;
}
// 写回结果
store_C_block(C_acc, C_gm, start_i, start_j, M, N);
}
}
private:
void load_A_block(__local__ float* dest, GM_ADDR src,
int start_i, int start_k, int M, int K, int N) {
for (int i = 0; i < BLOCK_SIZE; ++i) {
for (int k = 0; k < BLOCK_SIZE; k += VECTOR_SIZE) {
int global_i = start_i + i;
int global_k = start_k + k;
if (global_i < M && global_k < K) {
float8 data = vload8(0, ((float*)src) + global_i * K + global_k);
vstore8(data, 0, &dest[i * BLOCK_SIZE + k]);
}
}
}
}
};第三章 高级优化技术与性能分析
3.1 内存访问优化

内存访问优化是矩阵乘性能提升的关键。在Ascend C中,我们可以通过多种手段优化内存访问:
- 数据布局优化:选择适合硬件架构的数据排列方式。对于矩阵乘法,通常建议使用行优先存储,但具体选择需要结合硬件特性和访问模式。
- 缓存友好访问:通过分块技术确保数据在缓存中有效重用。理想的分块大小应该使数据块能够完全容纳在本地内存中,减少全局内存访问。
// 缓存优化的数据加载
class CacheOptimizedLoader {
public:
static void load_tile_with_prefetch(__local__ float* tile,
GM_ADDR src,
int row, int col,
int ld, int tile_size) {
// 预取数据
prefetch_to_local(src + row * ld + col, tile_size * sizeof(float));
// 异步加载
for (int i = 0; i < tile_size; i += 8) {
float8 data = vload8(0, ((float*)src) + (row + i) * ld + col);
vstore8_async(data, 0, &tile[i * tile_size]);
}
}
};Bank冲突避免:在并行访问共享内存时,确保不同线程访问不同的内存bank。可以通过调整数据布局或访问模式来消除冲突。
3.2 计算资源优化
计算资源优化关注如何充分利用AI Core的计算能力:
向量化计算:使用SIMD指令同时处理多个数据元素。Ascend C提供了丰富的向量内在函数支持。
// 向量化矩阵乘核心
class VectorizedCompute {
public:
static void matmul_vectorized(__local__ float* A,
__local__ float* B,
__local__ float* C,
int size) {
for (int i = 0; i < size; ++i) {
for (int j = 0; j < size; j += 8) {
float8 c_vec = vload8(0, &C[i * size + j]);
for (int k = 0; k < size; ++k) {
float8 a_vec = float8(A[i * size + k]);
float8 b_vec = vload8(0, &B[k * size + j]);
c_vec = __builtin_fma(a_vec, b_vec, c_vec);
}
vstore8(c_vec, 0, &C[i * size + j]);
}
}
}
};指令级并行:通过循环展开和软件流水线技术提高指令级并行度。
计算强度提升:增加每个内存访问对应的浮点操作数,提高计算内存比。
3.3 性能分析与调优
性能分析是优化的基础。我们需要建立科学的性能评估体系:
// 性能分析工具类
class Profiler {
private:
uint64_t start_time;
uint64_t total_cycles;
uint64_t memory_cycles;
public:
void start_measure() {
start_time = get_cycle_count();
}
void end_measure(const char* section) {
uint64_t end_time = get_cycle_count();
uint64_t duration = end_time - start_time;
total_cycles += duration;
printf("Section %s: %lu cycles\n", section, duration);
}
void analyze_performance(int M, int N, int K) {
double gflops = (2.0 * M * N * K) / (total_cycles * 1e-3);
double memory_bw = ((M * K + K * N + M * N) * sizeof(float)) /
(memory_cycles * 1e-3);
printf("Performance: %.2f GFLOPS, Memory BW: %.2f GB/s\n",
gflops, memory_bw);
}
};第四章 实际应用与高级特性
4.1 批处理矩阵乘法
在实际AI应用中,经常需要处理批量矩阵乘法:
class BatchedMatMul {
public:
__global__ __aicore__ void batched_matmul_kernel(
uint32_t blockDim, uint32_t l2ctrl, uint32_t buffer, uint32_t length,
int32_t batch_size, int32_t M, int32_t N, int32_t K) {
uint32_t task_id = get_task_id();
uint32_t task_num = get_task_num();
// 计算每个任务处理的batch数
int32_t batches_per_task = (batch_size + task_num - 1) / task_num;
int32_t start_batch = task_id * batches_per_task;
int32_t end_batch = min(start_batch + batches_per_task, batch_size);
GM_ADDR A_gm = GET_GLOBAL_BUFFER(buffer);
GM_ADDR B_gm = A_gm + batch_size * M * K * sizeof(float);
GM_ADDR C_gm = B_gm + batch_size * K * N * sizeof(float);
for (int batch = start_batch; batch < end_batch; ++batch) {
GM_ADDR A_batch = A_gm + batch * M * K * sizeof(float);
GM_ADDR B_batch = B_gm + batch * K * N * sizeof(float);
GM_ADDR C_batch = C_gm + batch * M * N * sizeof(float);
// 调用单矩阵乘法
optimized_matmul_kernel(blockDim, l2ctrl, (uint32_t)A_batch,
M * K * sizeof(float), M, N, K);
}
}
};4.2 支持不同数据类型的矩阵乘法
现代AI计算需要支持多种数据类型:
template<typename T>
class TypedMatMul {
public:
__global__ __aicore__ void typed_matmul_kernel(
uint32_t blockDim, uint32_t l2ctrl, uint32_t buffer, uint32_t length,
int32_t M, int32_t N, int32_t K) {
// 类型特定的优化策略
if constexpr (sizeof(T) == 2) {
// FP16优化策略
optimize_for_fp16();
} else if constexpr (sizeof(T) == 4) {
// FP32优化策略
optimize_for_fp32();
}
// 通用的矩阵乘法逻辑
// ...
}
private:
void optimize_for_fp16() {
// FP16特定的优化,如使用张量核心
use_tensor_cores_if_available();
}
void optimize_for_fp32() {
// FP32优化策略
optimize_vectorization();
}
};第五章 完整测试与验证框架
5.1 测试框架实现
完整的测试框架确保算子正确性和性能:
class MatMulTestFramework {
public:
struct TestConfig {
int M, N, K;
int batch_size;
DataType dtype;
bool verify_correctness;
int num_iterations;
};
struct TestResult {
double avg_time_ms;
double max_error;
double gflops;
bool passed;
};
TestResult run_test(const TestConfig& config) {
// 准备测试数据
auto [A, B, C_expected] = generate_test_data(config);
// 分配设备内存
auto [A_dev, B_dev, C_dev] = allocate_device_memory(config);
// 拷贝数据到设备
copy_to_device(A, B, A_dev, B_dev);
// 执行测试
auto timings = run_kernel_multiple_times(config, A_dev, B_dev, C_dev);
// 拷贝结果回主机
auto C_result = copy_from_device(C_dev, config);
// 验证正确性
bool correct = verify_correctness(C_expected, C_result, config);
// 计算性能指标
double gflops = calculate_gflops(config, timings);
return {calculate_average(timings),
calculate_max_error(C_expected, C_result),
gflops, correct};
}
private:
std::tuple<std::vector<float>, std::vector<float>, std::vector<float>>
generate_test_data(const TestConfig& config) {
std::vector<float> A(config.M * config.K);
std::vector<float> B(config.K * config.N);
std::vector<float> C_expected(config.M * config.N);
// 生成随机测试数据
std::random_device rd;
std::mt19937 gen(rd());
std::uniform_real_distribution<float> dis(-1.0f, 1.0f);
for (auto& val : A) val = dis(gen);
for (auto& val : B) val = dis(gen);
// 计算参考结果
compute_reference_matmul(A, B, C_expected, config);
return {A, B, C_expected};
}
bool verify_correctness(const std::vector<float>& expected,
const std::vector<float>& actual,
const TestConfig& config) {
double max_error = 0.0;
for (size_t i = 0; i < expected.size(); ++i) {
double error = std::abs(expected[i] - actual[i]);
max_error = std::max(max_error, error);
if (error > config.tolerance) {
std::cout << "Error at index " << i << ": expected "
<< expected[i] << ", got " << actual[i]
<< " (error: " << error << ")" << std::endl;
return false;
}
}
std::cout << "Verification passed. Max error: " << max_error << std::endl;
return true;
}
};5.2 性能基准测试
建立全面的性能基准测试体系:
class BenchmarkSuite {
public:
void run_comprehensive_benchmark() {
std::vector<TestConfig> test_cases = {
// 小矩阵测试
{128, 128, 128, 1, FP32, true, 100},
{256, 256, 256, 1, FP32, true, 50},
// 中等矩阵测试
{512, 512, 512, 1, FP32, true, 20},
{1024, 1024, 1024, 1, FP32, true, 10},
// 大矩阵测试
{2048, 2048, 2048, 1, FP32, true, 5},
{4096, 4096, 4096, 1, FP32, true, 2},
// 批处理测试
{256, 256, 256, 16, FP32, true, 10},
{512, 512, 512, 8, FP32, true, 5}
};
MatMulTestFramework framework;
for (const auto& config : test_cases) {
auto result = framework.run_test(config);
log_result(config, result);
analyze_performance(config, result);
}
}
private:
void analyze_performance(const TestConfig& config, const TestResult& result) {
double theoretical_peak = get_theoretical_peak();
double efficiency = (result.gflops / theoretical_peak) * 100.0;
std::cout << "Matrix " << config.M << "x" << config.K << " * "
<< config.K << "x" << config.N << ": " << result.gflops
<< " GFLOPS (" << efficiency << "% of peak)" << std::endl;
}
};通过这个完整的开发框架,我们可以系统地开发、测试和优化矩阵乘自定义算子,确保其在昇腾AI处理器上达到最佳性能。这种系统化的开发方法不仅适用于矩阵乘法,也可以推广到其他类型的自定义算子开发中。
2025年昇腾CANN训练营第二季,基于CANN开源开放全场景,推出0基础入门系列、码力全开特辑、开发者案例等专题课程,助力不同阶段开发者快速提升算子开发技能。获得Ascend C算子中级认证,即可领取精美证书,完成社区任务更有机会赢取华为手机,平板、开发板等大奖。
报名链接:https://www.hiascend.com/developer/activities/cann20252

作为“人工智能6S店”的官方数字引擎,为AI开发者与企业提供一个覆盖软硬件全栈、一站式门户。
更多推荐
 4
4 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)